Hi,
Posting here an example launch file to use RS-BPearl data for mapping:
roslaunch rtabmap_ros rtabmap.launch \
use_sim_time:=false \
depth:=false \
subscribe_scan_cloud:=true \
frame_id:=rslidar \
scan_cloud_topic:=/rslidar_points \
scan_cloud_max_points:=64000 \
icp_odometry:=true \
approx_sync:=false \
scan_cloud_assembling:=true \
scan_cloud_assembling_time:=0 \
scan_cloud_assembling_max_clouds:=5 \
args:="-d \
--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 0 \
--Odom/ScanKeyFrameThr 0.8 \
--OdomF2M/ScanMaxSize 20000 \
--OdomF2M/ScanSubtractRadius 0.5 \
--Icp/PM true \
--Icp/VoxelSize 0.5 \
--Icp/MaxTranslation 2 \
--Icp/MaxCorrespondenceDistance 1.5 \
--Icp/PMOutlierRatio 0.7 \
--Icp/Iterations 10 \
--Icp/PointToPlane false \
--Icp/PMMatcherKnn 3 \
--Icp/PMMatcherEpsilon 1 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 10 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01"
roslaunch rslidar_sdk start.launch
Here some results from a PCAP with the sensor on a car looking towards the side of the road:

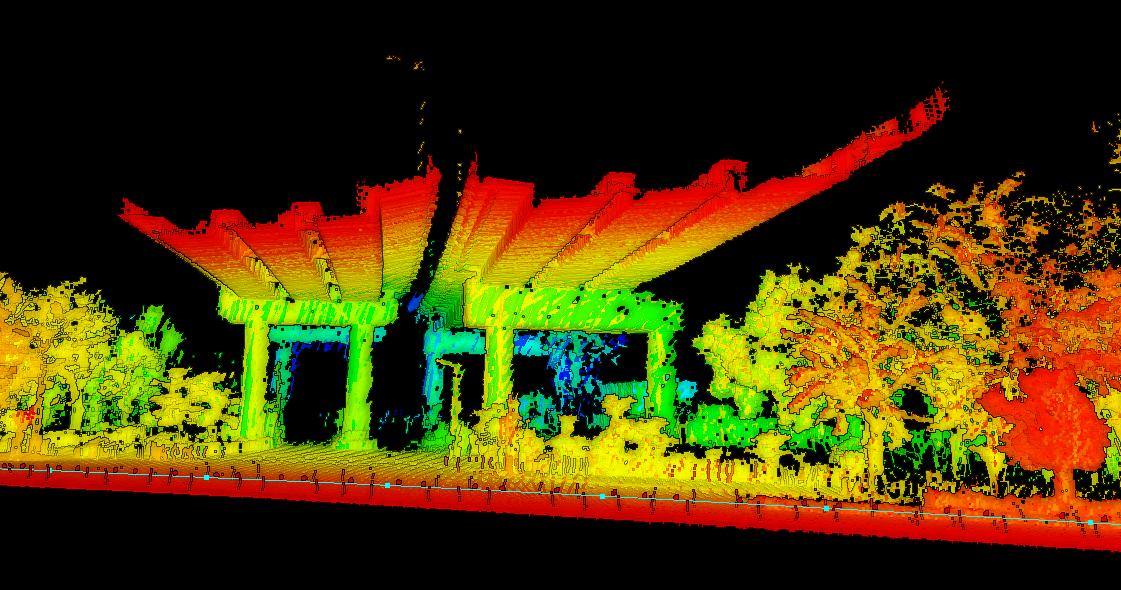
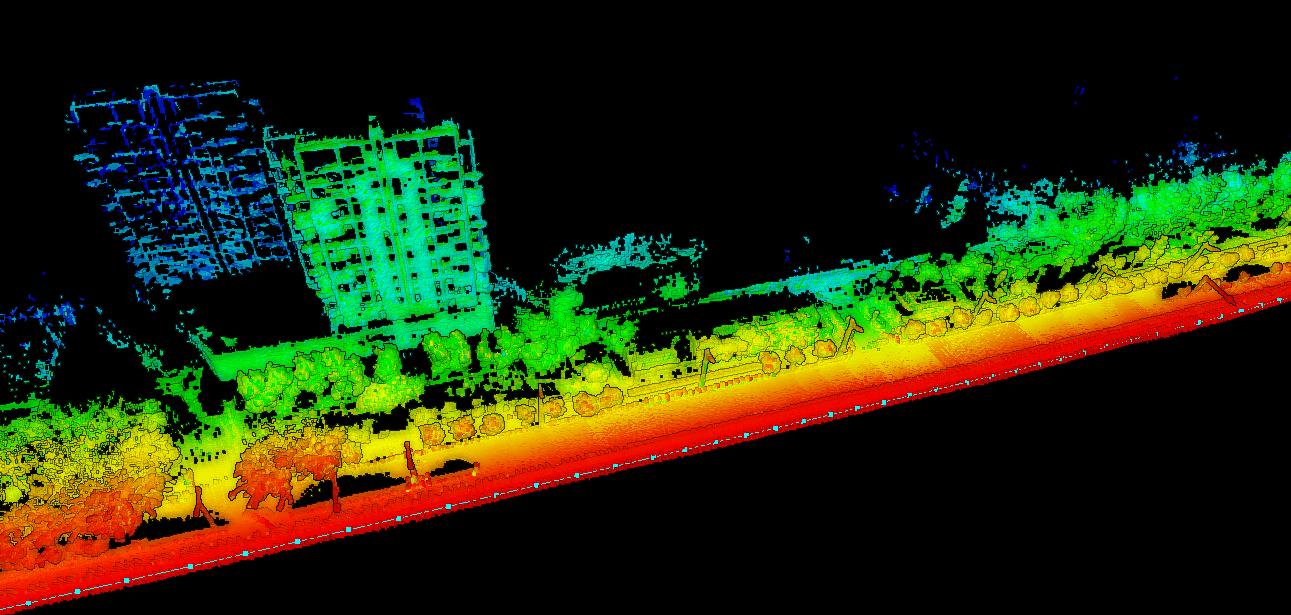
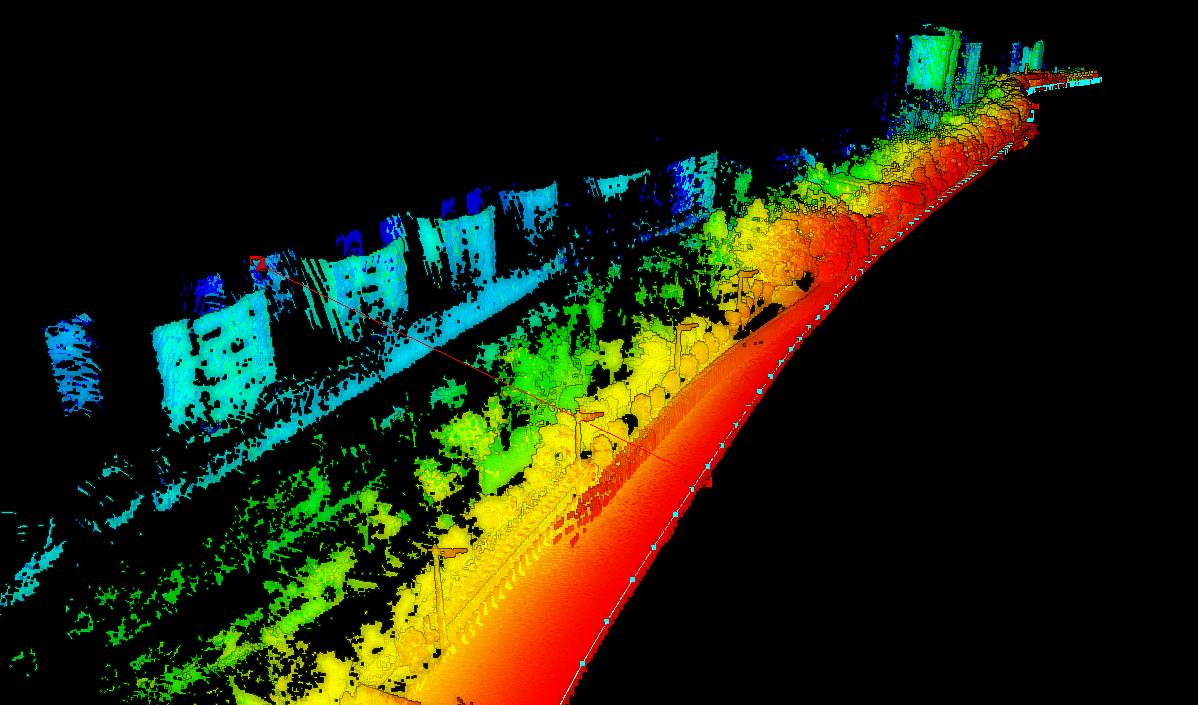
The red line is a measurement of around 75 meters from the lidar.

