Hi.
I am experiencing an issue where the z position of the base_footprint relative to the odom frame drifts quite a bit over time. I am currently using only rgbd_odometry for odometry on my robot, as my wheel encoders are not very accurate. The 2D/3D maps look excellent, and the x/y odometry seems pretty good too, but I just notice that after a short time the robot will either sink into the map or start to hover above it:
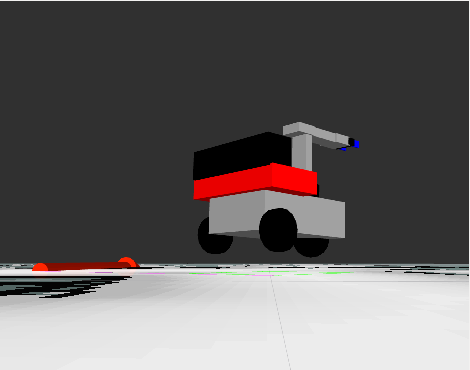
I am currently using the Kinect robot setup recommended
here, and have also tried with Reg/Force3DoF set to true, but this did not help with the problem.
I was wondering what you think might be causing this, and any way to fix it?
Many thanks.

