Hi, thank you so much for sharing this amazing software!
i'm pretty new to all this amazing Stuff, i managed to get first results with realsense D435i after reading as much as possible about what all these settings do.
It worked best with leaving almost everything on default and using the intels D400 Series Visual Presets.
I have some issues when i try to scan buildings and i hope i can get some headups and tricks what i need to change.
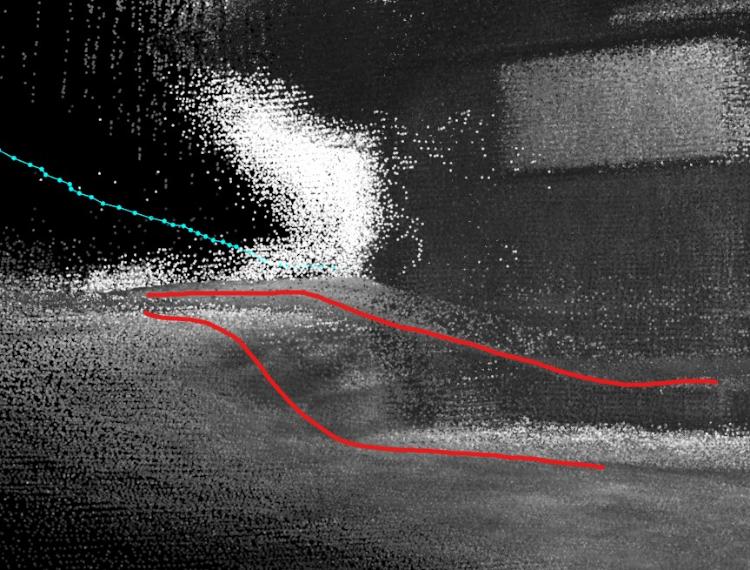
One of the biggest issues i get every time, is that the localisation seems to have a problem when the terrain around the building has slopes. Ever time when walk down the slope while scanning, i get a serious deformation or a second Corner of the house.
This happens always at the end of the house when im around the house, but i
guess its because of the slope i walk down.
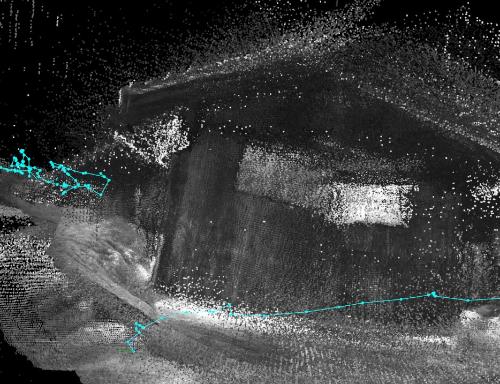
Is there a tutorial around on how i can filter all the noise around the house?, as it seems rtab and d435i scans the house almost perfect.
But then there is alot of noise around i can't explain from where it come.
this image shows a scan with the house almopst perfect, if the noise that is all white would be gone its amazing (except the last corner that is bended again)
For any tips and tricks i thank you very much!
best regards
Pascal