Hi,
I am working with a Kinect via freenect and I am trying to generate a 3D map using Rtabmap.
In order to generate it I execute the following comands:
roslaunch freenect_launch freenect.launch depth_registration:=true
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start"
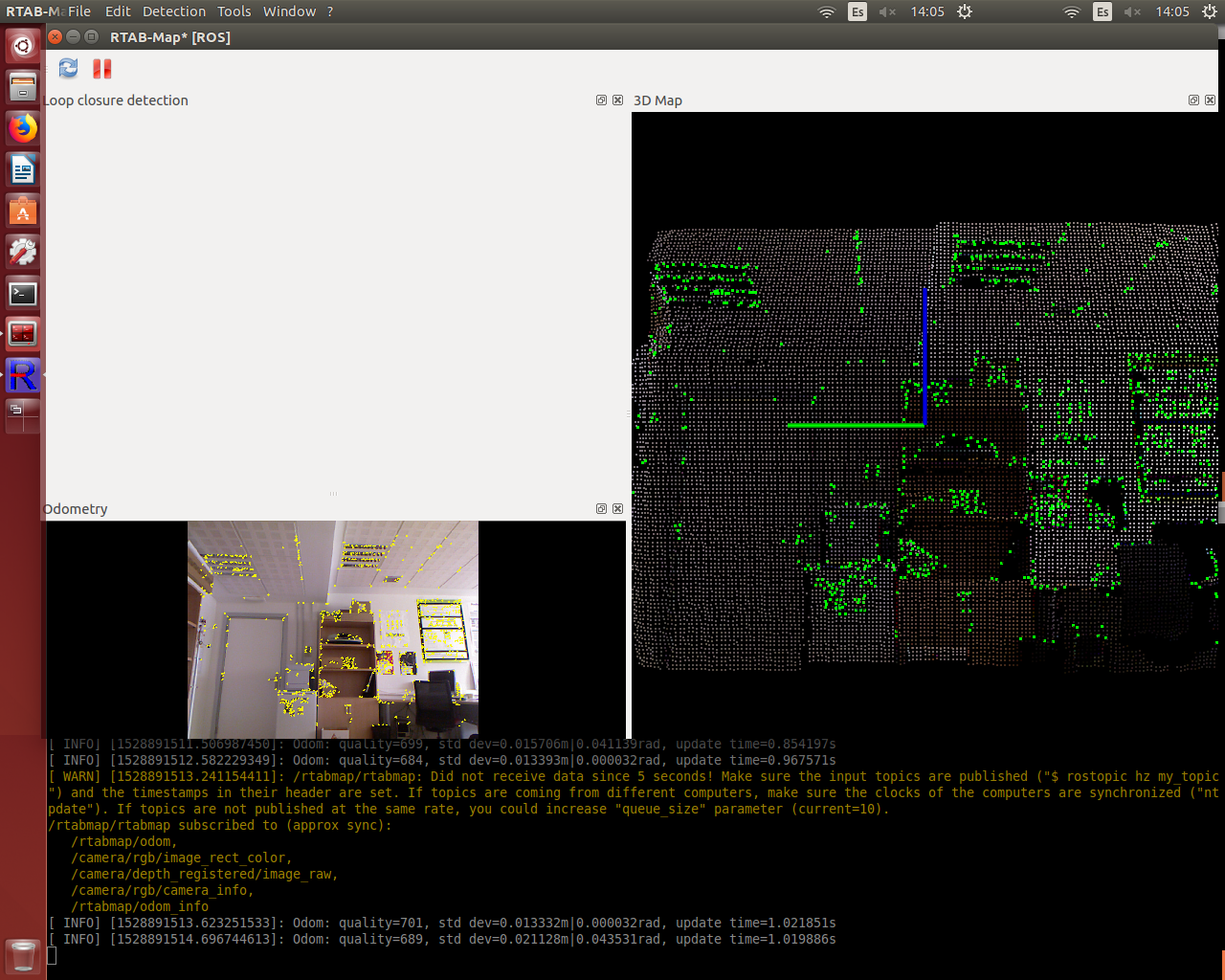
Some days ago map was generated correctly a couple of times, but then something happened and now it does not work properly.
The "loop closure detection" window is empty and it does not appear the text "New ID = 1[0]" on top of Rtabmap interface...UNTIL I start any other task in the PC like for example openning Mozzilla Firefox. When that happens in the terminal running Rtabmap it can be read this warning:
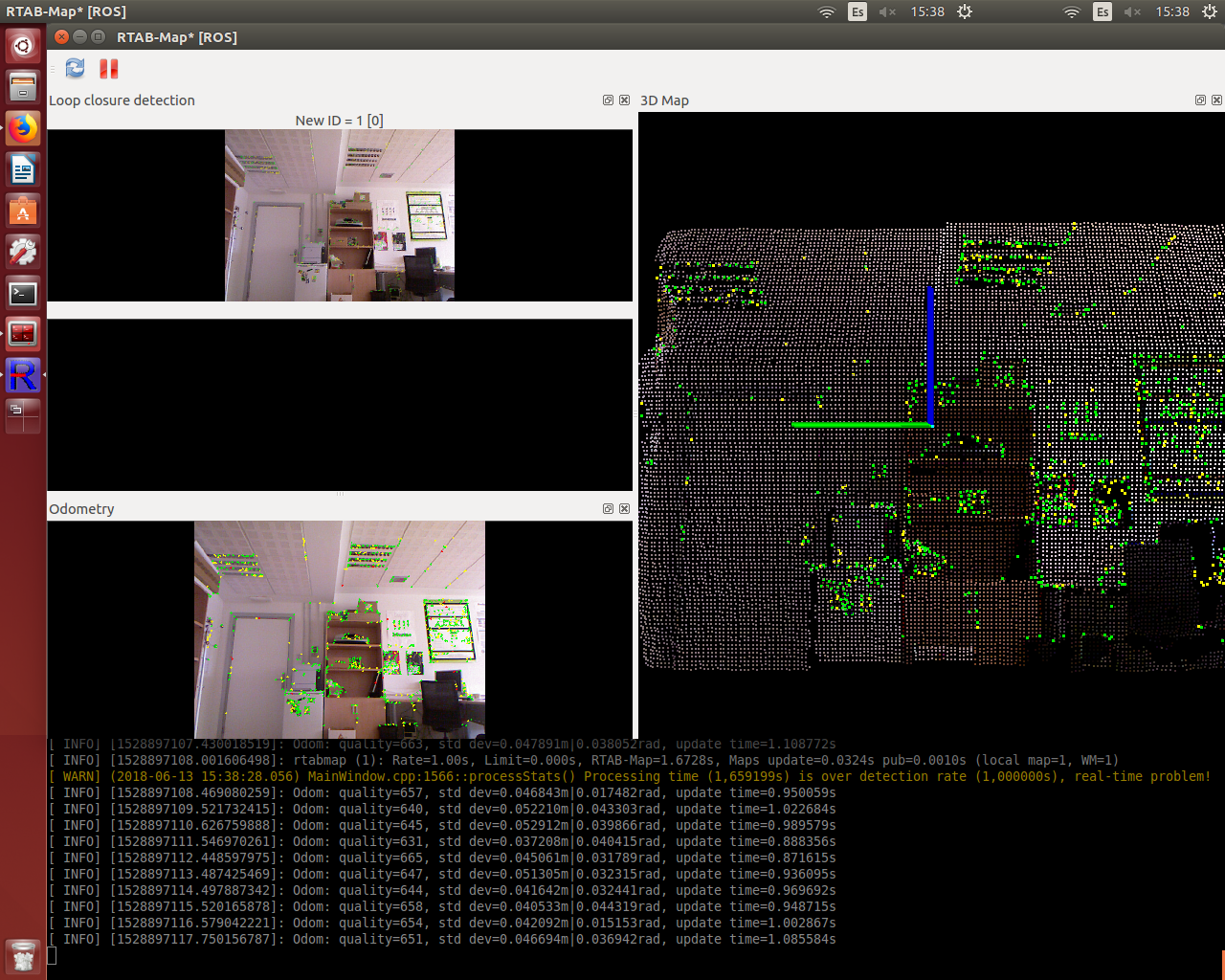
[ WARN ] MainWindow.cpp: 1566::processStats() Processing time (1,181013 s) is over detection rate (1,000000 s), real-time problem!
And loop closure detection window appears and it can be read on top of it "New ID = 1[0]".
From this moment, when a new task is started in the PC, the ID increments in 1 while it can be read in terminal again the warning commented before. So, every time processing time is over detection rate the ID is incremented, but if I do not start any other task seems like ID remains unchanged.
I would like to know how can I solve this problem. Thank you for your time.