Hi Mathieu,
Thanks for your reply. There are no errors printed for move_base. The terminal prints this:
0s, RTAB-Map=0.0942s, Maps update=0.0022s pub=0.0000s (local map=227, WM=227)
[ WARN] (2021-02-27 21:47:21.927) RegistrationVis.cpp:147::parseParameters() Vis/MinInliers should be >= 6 but it is set to 5, setting to 6.
[ WARN] (2021-02-27 21:47:21.969) RegistrationIcp.cpp:1138::computeTransformationImpl() ICP PointToPlane ignored for 2d scans with PCL registration (some crash issues). Use libpointmatcher (Icp/PM) or disable Icp/PointToPlane to avoid this warning.
[ INFO] [1614480441.978002499, 2452.559000000]: rtabmap (3059): Rate=1.00s, Limit=0.700s, RTAB-Map=0.1078s, Maps update=0.0021s pub=0.0000s (local map=227, WM=227)
[ WARN] (2021-02-27 21:47:22.965) RegistrationVis.cpp:147::parseParameters() Vis/MinInliers should be >= 6 but it is set to 5, setting to 6.
[ WARN] (2021-02-27 21:47:23.007) RegistrationIcp.cpp:1138::computeTransformationImpl() ICP PointToPlane ignored for 2d scans with PCL registration (some crash issues). Use libpointmatcher (Icp/PM) or disable Icp/PointToPlane to avoid this warning.
[ INFO] [1614480443.015409097, 2453.575000000]: rtabmap (3060): Rate=1.00s, Limit=0.700s, RTAB-Map=0.1167s, Maps update=0.0036s pub=0.0000s (local map=227, WM=227)
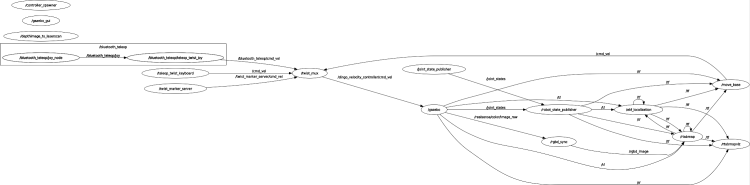
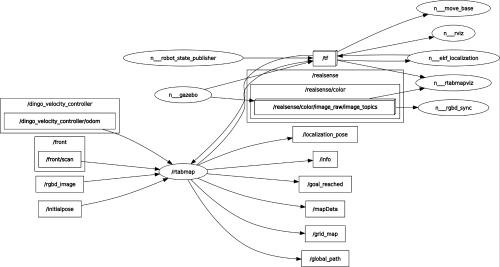
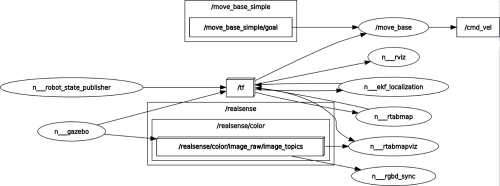
I checked rqt_graph for rtabmap and move base node (attached below)
It seems that move_base is not connected to rtabmap. Is it possible that I need to remap some move_base parameters?
I have followed
navigation stack provided by clear path robotics for dingo robot
I am copying the move_base launch file below:
launch>
<group if="$(optenv DINGO_OMNI 0)">
<rosparam file="$(dirname)/../../params/dingo_o_params.yaml" command="load" />
</group>
<group unless="$(optenv DINGO_OMNI 0)">
<rosparam file="$(dirname)/../../params/dingo_d_params.yaml" command="load" />
</group>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(dirname)/../../params/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(dirname)/../../params/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(dirname)/../../params/map_nav_params/local_costmap_params.yaml" command="load" />
<rosparam file="$(dirname)/../../params/map_nav_params/global_costmap_params.yaml" command="load" />
<rosparam file="$(dirname)/../../params/base_local_planner_params.yaml" command="load" />
<rosparam file="$(dirname)/../../params/move_base_params.yaml" command="load" />
<remap from="odom" to="odometry/filtered" />
</node>
</launch>
Please let me know if you can find what I am doing wrong. I have been trying to fix this constantly but unfortunately couldn't find something similar online
Thank you so much !