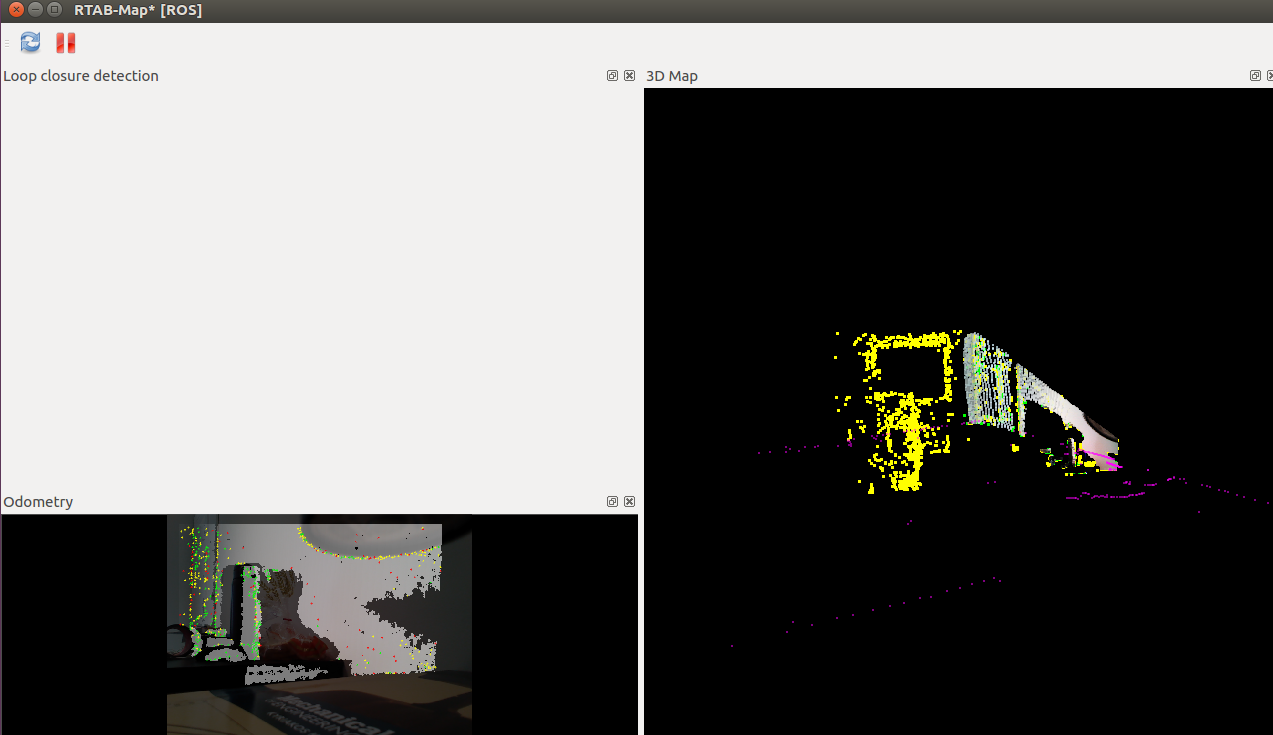
Hi, I created a Rtabmap launch file but when I tried to run it, Rtabmap does not save the point cloud as I rotate my camera. I have posted a picture below
The code:
<div style="background: #ffffff; overflow:auto;width:auto;border:solid gray;border-width:.1em .1em .1em .8em;padding:.2em .6em;"><pre style="margin: 0; line-height: 125%">
<launch
> <group ns
="rtabmap"> <arg name
="launch_prefix" default=""/>
<arg name
="output" default="screen"/> <!-- Odometry
--> <node pkg
="rtabmap_ros" type
="rgbd_odometry" name
="rgbd_odometry" output
="screen"> <remap from
="rgb/image" to
="/camera/rgb/image_rect_color"/> <remap from
="depth/image" to
="/camera/depth_registered/image_raw"/> <remap from
="rgb/camera_info" to
="/camera/rgb/camera_info"/> <remap from
="rgbd_image" to
="/camera/rgb/image_rect_color"/> <remap from
="odom" to
="/odom"/> <param name
="frame_id" type
="string" value
="camera_link"/> </node
> <node name
="rtabmap" pkg
="rtabmap_ros" type
="rtabmap" output
="screen" args
="--delete_db_on_start"> <param name
="frame_id" type
="string" value
="camera_link"/> <param name
="subscribe_depth" type
="bool" value
="true"/> <param name
="subscribe_scan" type
="bool" value
="true"/> <remap from
="odom" to
="odom"/> <remap from
="scan" to
="/scan"/> <remap from
="rgb/image" to
="/camera/rgb/image_rect_color"/> <remap from
="depth/image" to
="/camera/depth_registered/image_raw"/> <remap from
="rgb/camera_info" to
="/camera/rgb/camera_info"/> <param name
="queue_size" type
="int" value
="10"/> <!-- RTAB
-Map
's parameters
--> <param name
="RGBD/NeighborLinkRefining" type
="string" value
="true"/> <param name
="RGBD/ProximityBySpace" type
="string" value
="true"/> <param name
="RGBD/AngularUpdate" type
="string" value
="0.01"/> <param name
="RGBD/LinearUpdate" type
="string" value
="0.01"/> <param name
="RGBD/OptimizeFromGraphEnd" type
="string" value
="false"/> <param name
="Optimizer/Slam2D" type
="string" value
="true"/> <param name
="Reg/Strategy" type
="string" value
="1"/> <!-- 1=ICP
--> <param name
="Reg/Force3DoF" type
="string" value
="false"/> <param name
="Vis/MinInliers" type
="string" value
="5"/> <param name
="Vis/InlierDistance" type
="string" value
="0.1"/> <param name
="Rtabmap/TimeThr" type
="string" value
="700"/> <param name
="Mem/RehearsalSimilarity" type
="string" value
="0.45"/> <param name
="Grid/NoiseFilteringRadius" type
="string" value
="0.05"/> <param name
="Grid/NoiseFilteringMinNeighbors" type
="string" value
="8"/> <param name
="Grid/FromDepth" type
="string" value
="false"/> <param name
="RGBD/ProximityPathMaxNeighbors" type
="string" value
="10"/> </node
> <node
if="true" pkg
="rtabmap_ros" type
="rtabmapviz" name
="rtabmapviz" output
="$(arg output)" launch
-prefix
="$(arg launch_prefix)"> <param name
="subscribe_depth" type
="bool" value
="true"/> <param name
="subscribe_scan" type
="bool" value
="true"/> <param name
="subscribe_odom_info" type
="bool" value
="true"/> <param name
="subscribe_scan_cloud" type
="bool" value
="false"/> <param name
="frame_id" type
="string" value
="camera_link"/> <param name
="odom_frame_id" type
="string" value
="odom"/> <param name
="wait_for_transform_duration" type
="double" value
="0.2"/> <param name
="queue_size" type
="int" value
="10"/> <param name
="approx_sync" type
="bool" value
="true"/>
<remap from
="rgb/image" to
="/camera/rgb/image_rect_color"/> <remap from
="depth/image" to
="/camera/depth_registered/image_raw"/> <remap from
="rgb/camera_info" to
="/camera/rgb/camera_info"/> <remap from
="rgbd_image" to
="/camera/rgb/image_rect_color"/>
<remap from
="scan" to
="/scan"/>
<remap from
="odom" to
="/odom"/> </node
> <node pkg
="tf" type
="static_transform_publisher" name
="cam_to_laser"
args
="0.0 0.0 0.02 0.0 0.0 0.0 /camera_link /laser 100" /> </group
></launch
></pre></div>

