Hello, Really Thank you!
Change of launch file as you said worked!
Now I could successfully re-localize(Hooray!)
But I directly met another problems...
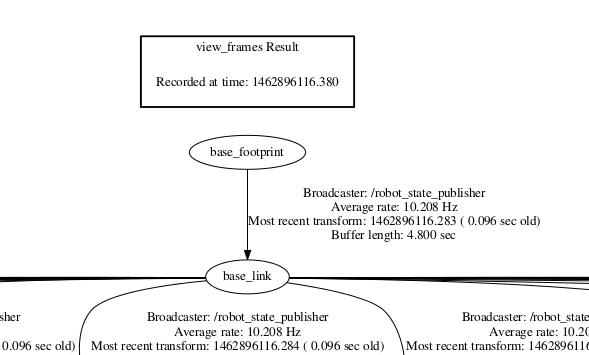
First of all, I changed the frequency at that file of location to 10Hz, but the TF warnings didn't disappear(keeps coming out). I changed the file of Turtlebot, because I launch mapping at turtlebot.
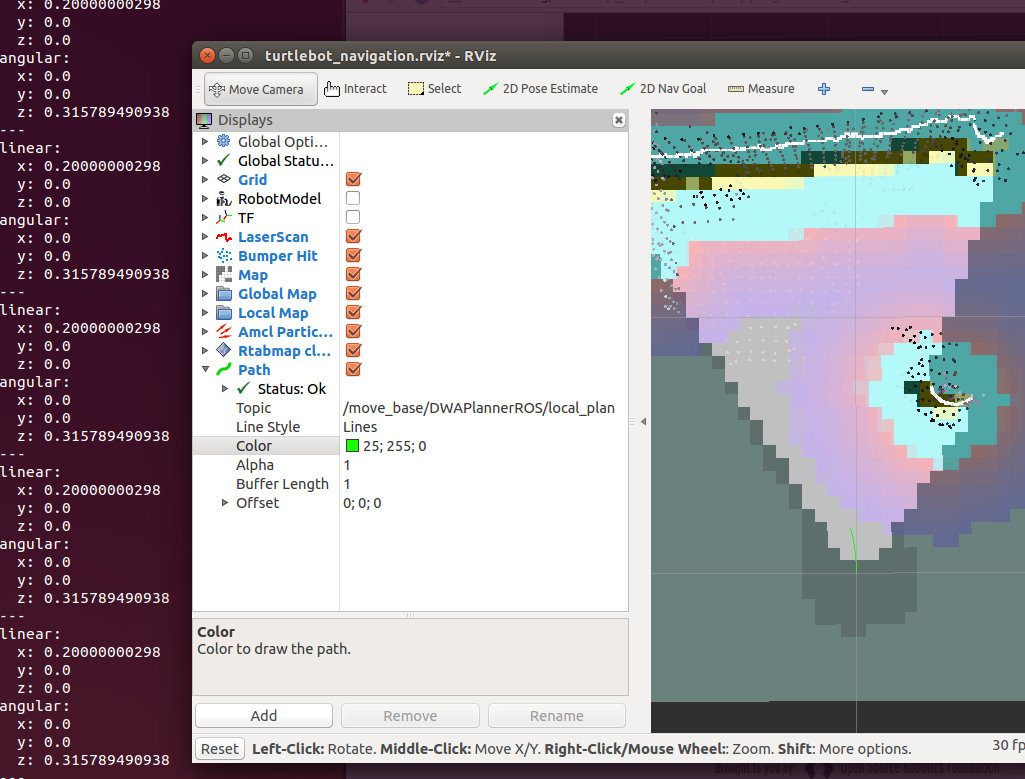
Second, 2D navigation doesn't work. Would it be due to first reason? It just gets new plan but never move or rotate. In hope that it would help for finding the problem, I will write all the warnings I got.
[ WARN] (2016-05-09 11:14:58.281) Rtabmap.cpp:904::process() Odometry is reset (identity pose detected). Increment map id to 1! (This appears quite a lot only when I start mapping).
[ WARN] (2016-05-09 11:20:16.382) util3d_registration.cpp:173::transformFromXYZCorrespondences() RANSAC refineModel: Refinement failed: got an empty set of inliers!
(According to your prior response that not enough inlier is not a problem, I thought this won't be also, but just in case).
[pcl::IterativeClosestPoint::computeTransformation] Not enough correspondences found. Relax your threshold parameters. Would it be help?
For last, when I relocalize, the map and 3d points appear. That's great but sometimes, within time(or if I go somewhere), point clouds and global map far from current robot position disappears. Is there way to preserve them??
(I once saw a global Error : new features found not in global costmap? (I'm not sure about the statement) (At first there isn't global error)).
(Sometimes, it even happens like this. When re-localization occurs, not all the 2D map and 3d point clouds appear.
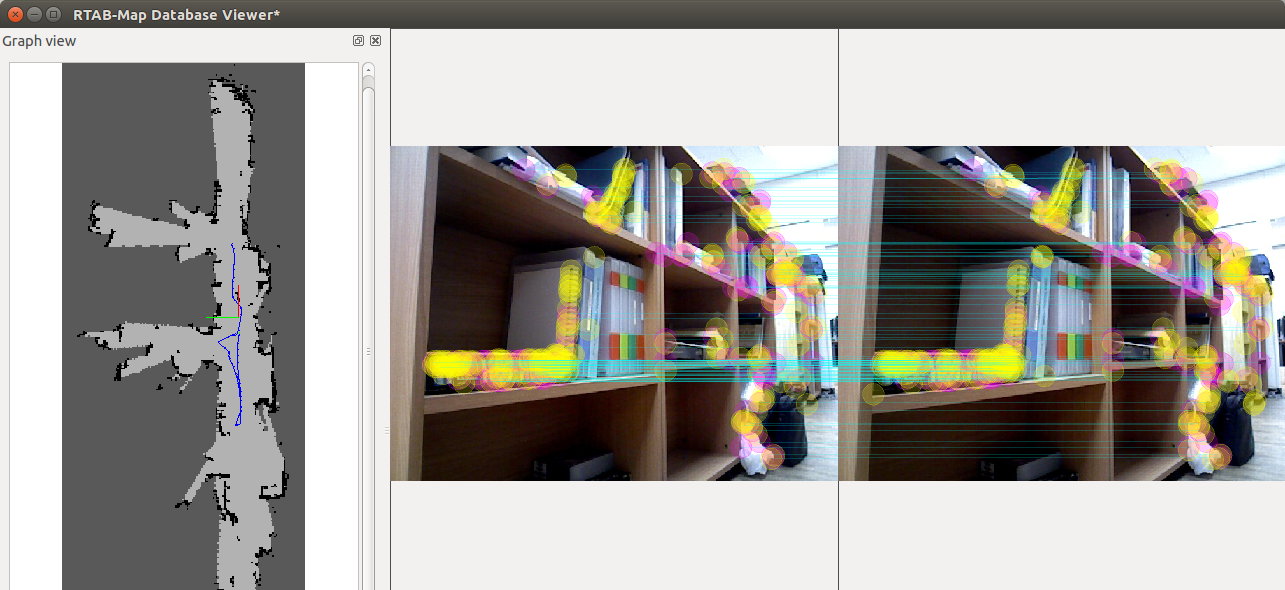
I checked that the database file have entire point cloud and map of my lab with the tool rtabmap-databaseViewer, but
when re-localization occurs, not entire map appeared.)(Is there limit of memory or something?)
I am really appreciating your help. Couldn't thank more.
-----------------------Original Message-----------------------From: "matlabbe [via Official RTAB-Map Forum]" <ml-node+s67519n1268h51@n6.nabble.com>To: zelda <iuc777@kaist.ac.kr>Sent date: 2016-05-09 10:28:15 GMT +0900 (Asia/Seoul)Subject: RE: Re: Rtabmap mapping done but can't do relocalization
Hi,
1) The problem is mainly the first warning. Well, it is not super clear, but it means that ICP has under 30% correspondences when registering the fake laser scans from the kinect. You can either disable ICP refining or decrease the acceptance threshold. I think you are on version 0.10 as the default value is 30% (on 0.11 it is 20%), I'll give corresponding parameters for 0.10 and 0.11:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
</node>
2) For the second warning, this is a correct one, there are just not enough visual correspondences to compute a good transformation between the two point of view, so the loop closure is rejected.
3) The third warning could be fixed following the "almost hidden" comment at the bottom of
the tutorial page:
If there are many TF warnings, you can try to increase robot_state_publisher's publishing frequency in turtlebot_bringup/launch/includes/robot.launch.xml from 5 to 10 Hz.
cheers,
Mathieu