Hi Mathieu
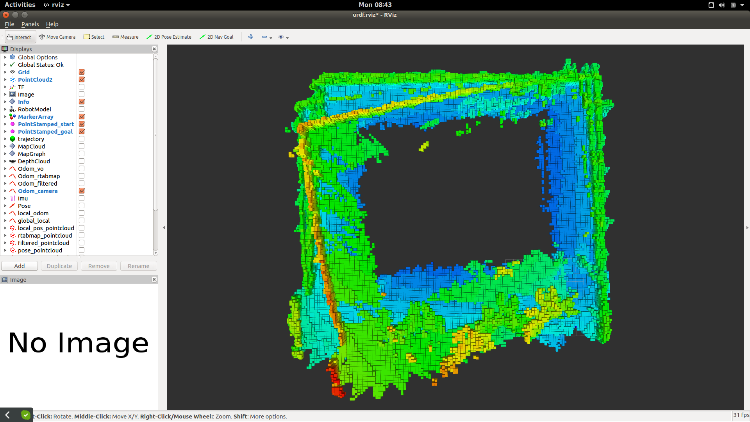
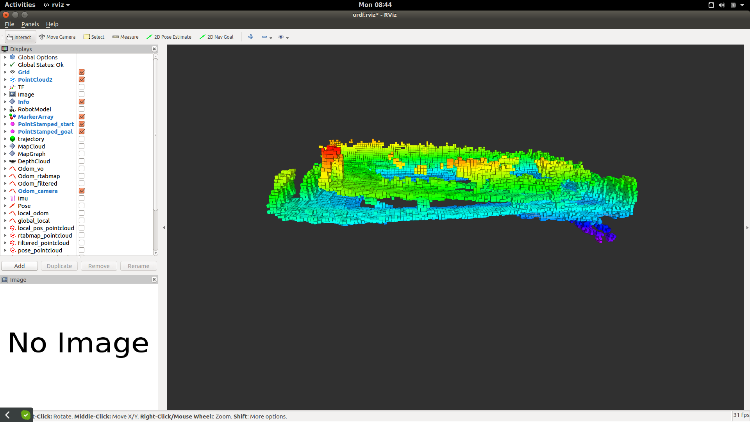
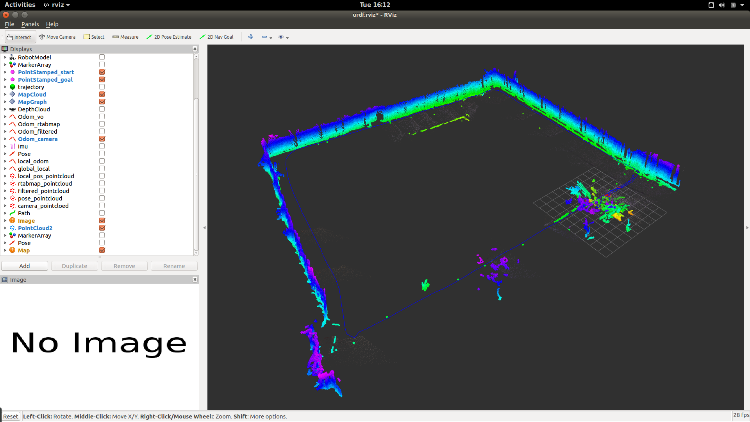
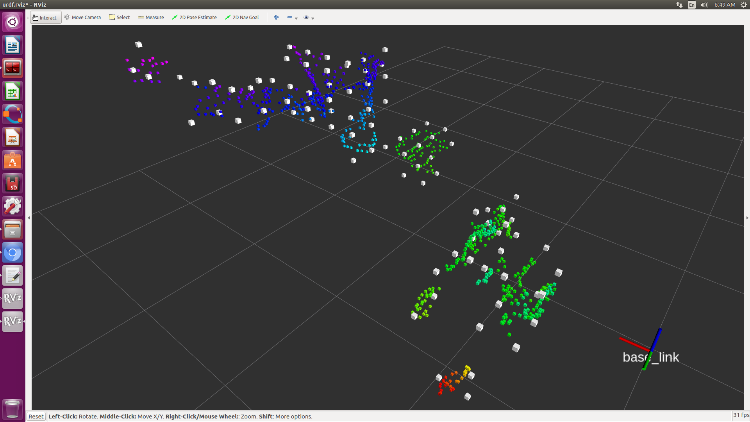
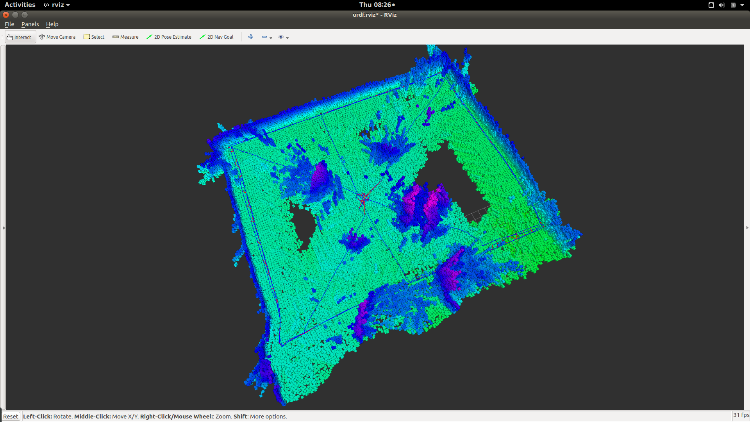
Here you are a ,bag file I have run it with the scrip placed below. I hope you can load it and able to run it and see how the octomap does not delete what is remain after the update of the rtabmap.
I am looking forward to your replay
https://www.dropbox.com/s/zponjnbnyj2jnxv/fityard.bag?dl=0<?xml version="1.0"?>
<launch>
<arg name="camera_frame" default="zed_camera_center" />
<node pkg="static_transform_mux" type="static_transform_mux" name="static_transform" output="screen"/>
<group ns="/zed/">
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3" />
<arg name="rgb_topic" value="/zed/zed_node/rgb/image_rect_color" />
<arg name="depth_topic" value="/zed/depth/depth_filtered" />
<arg name="camera_info_topic" value="/zed/zed_node/rgb/camera_info" />
<arg name="depth_camera_info_topic" value="/zed/zed_node/depth/camera_info" />
<arg name="frame_id" value="$(arg camera_frame)" />
<arg name="odom_frame_id" value="odom" />
<arg name="approx_sync" value="false" />
<arg name="visual_odometry" value="false" />
<arg name="rtabmapviz" value="false" />
<arg name="rviz" value="false" />
<arg name="odom_topic" value="/zed/zed_node/odom" />
<arg name="imu_topic" value="/mavros/imu/data"/>
<(param) name="Optimizer/GravitySigma " type="string" value="0.3"/>
<(param) name="Grid/NormalsSegmentation" type="bool" value="false"/>
<(param) name =" Grid/MaxGroundHeight" type="double" value="0.05"/>
<(param) name="Optimizer/Strategy" type="string" value="1"/>
<(param) name="RGBD/OptimizeStrategy" type="string" value="1"/>
</include>
</group>
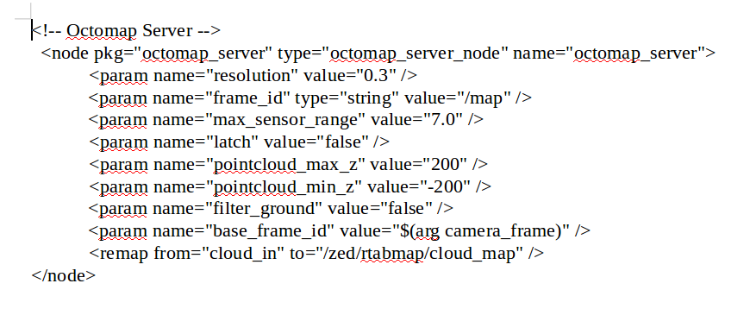
<node pkg="octomap_server" type="octomap_server_node" name="octomap_server">
<(param) name="resolution" value="0.3" />
<(param) name="frame_id" type="string" value="/map" />
<(param) name="max_sensor_range" value="7.0" />
<(param) name="latch" value="false" />
<(param) name="pointcloud_max_z" value="200" />
<(param) name="pointcloud_min_z" value="-200" />
<(param) name="filter_ground" value="false" />
<(param) name="base_frame_id" value="$(arg camera_frame)" />
<remap from="cloud_in" to="/zed/rtabmap/cloud_map" />
</node>
</launch>