Hi all!
I'm trying to get a simulation with the robot from Robotnik, Summit-XL and the Rtabmap_ros package.
I have followed this question:
rtabmap_ros on p3dx with wheel odometry and kinect data But still having problems.
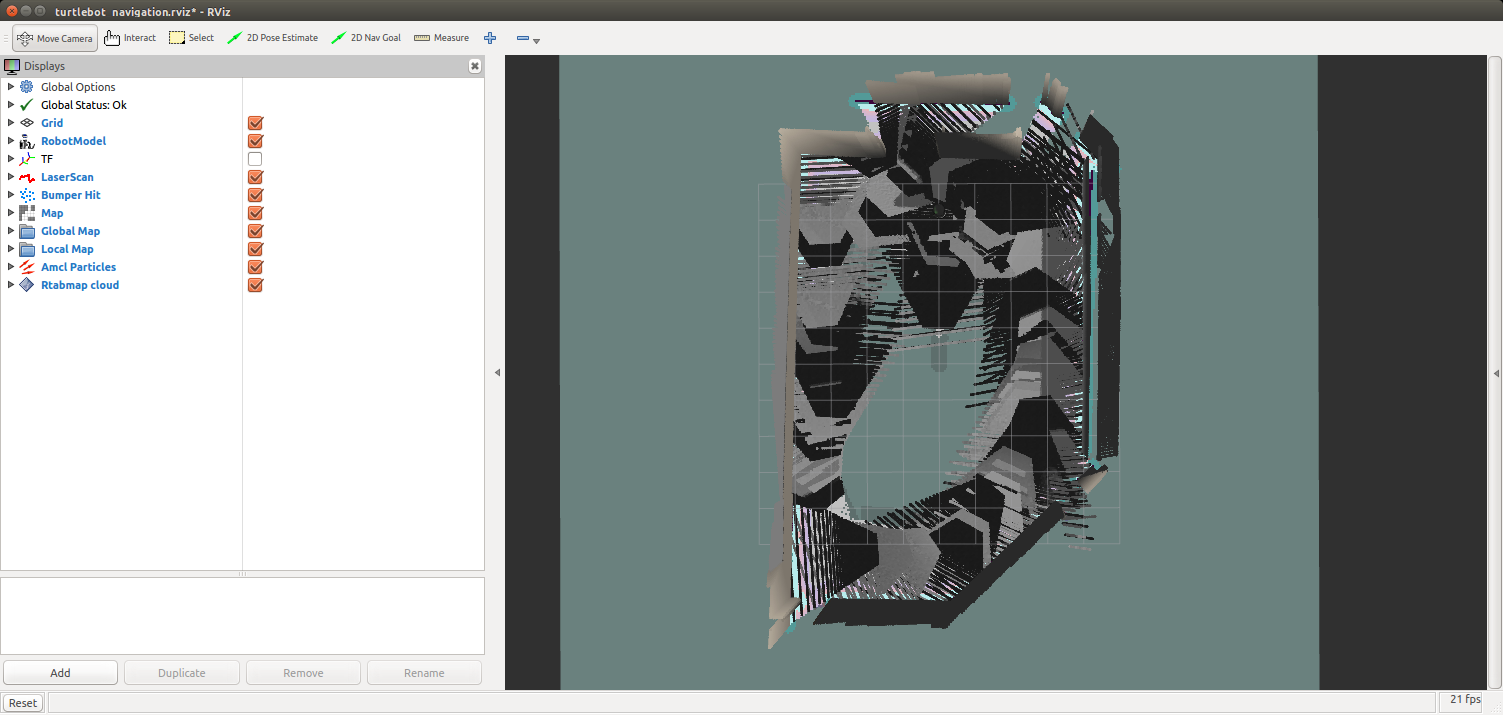
At this point, I can launch the robot, teleoperate it and can map with the lidar, the odom and gmapping.
The problem is when I launch rtabmap_ros. Now, I'm using this file:
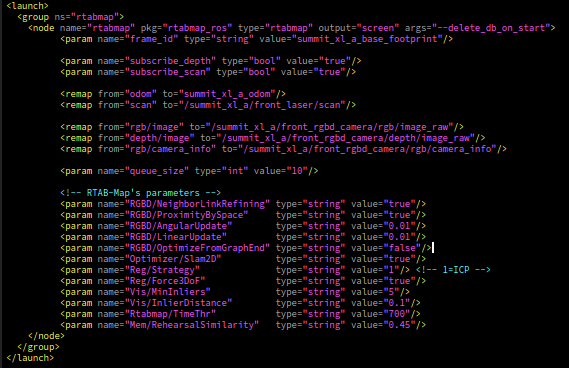
<launch>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<remap from="odom" to="/summit_xl_a_odom"/>
<remap from="scan" to="/summit_xl_a/front_laser/scan"/>
<remap from="rgb/image" to="/summit_xl_a/front_rgbd_camera/rgb/image_raw"/>
<remap from="depth/image" to="/summit_xl_a/front_rgbd_camera/depth/image_raw"/>
<remap from="rgb/camera_info" to="/summit_xl_a/front_rgbd_camera/rgb/camera_info"/>
</node>
</group>
</launch>
And these are my topics:
jorge@asus:~$ rostopic list
/clicked_point
/clock
/diagnostics
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/gazebo_gui/parameter_descriptions
/gazebo_gui/parameter_updates
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/summit_xl_a/cmd_vel
/summit_xl_a/docker/cmd_vel
/summit_xl_a/front_laser/scan
/summit_xl_a/front_rgbd_camera/depth/camera_info
/summit_xl_a/front_rgbd_camera/depth/image_raw
/summit_xl_a/front_rgbd_camera/depth/points
/summit_xl_a/front_rgbd_camera/parameter_descriptions
/summit_xl_a/front_rgbd_camera/parameter_updates
/summit_xl_a/front_rgbd_camera/rgb/camera_info
/summit_xl_a/front_rgbd_camera/rgb/image_raw
/summit_xl_a/front_rgbd_camera/rgb/image_raw/compressed
/summit_xl_a/front_rgbd_camera/rgb/image_raw/compressed/parameter_descriptions
/summit_xl_a/front_rgbd_camera/rgb/image_raw/compressed/parameter_updates
/summit_xl_a/front_rgbd_camera/rgb/image_raw/compressedDepth
/summit_xl_a/front_rgbd_camera/rgb/image_raw/compressedDepth/parameter_descriptions
/summit_xl_a/front_rgbd_camera/rgb/image_raw/compressedDepth/parameter_updates
/summit_xl_a/front_rgbd_camera/rgb/image_raw/theora
/summit_xl_a/front_rgbd_camera/rgb/image_raw/theora/parameter_descriptions
/summit_xl_a/front_rgbd_camera/rgb/image_raw/theora/parameter_updates
/summit_xl_a/imu/data
/summit_xl_a/imu/data/accel/parameter_descriptions
/summit_xl_a/imu/data/accel/parameter_updates
/summit_xl_a/imu/data/bias
/summit_xl_a/imu/data/rate/parameter_descriptions
/summit_xl_a/imu/data/rate/parameter_updates
/summit_xl_a/imu/data/yaw/parameter_descriptions
/summit_xl_a/imu/data/yaw/parameter_updates
/summit_xl_a/joint_states
/summit_xl_a/map
/summit_xl_a/map_metadata
/summit_xl_a/move_base/cmd_vel
/summit_xl_a/odometry/filtered_odom
/summit_xl_a/pad_teleop/cmd_vel
/summit_xl_a/robotnik_base_control/cmd_vel
/summit_xl_a/robotnik_base_control/odom
/summit_xl_a/robotnik_base_control/parameter_descriptions
/summit_xl_a/robotnik_base_control/parameter_updates
/summit_xl_a/set_pose
/summit_xl_a/slam_gmapping/entropy
/summit_xl_a/summit_xl_a_front_ptz_camera/camera_info
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/compressed
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/compressed/parameter_descriptions
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/compressed/parameter_updates
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/compressedDepth
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/compressedDepth/parameter_descriptions
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/compressedDepth/parameter_updates
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/theora
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/theora/parameter_descriptions
/summit_xl_a/summit_xl_a_front_ptz_camera/image_raw/theora/parameter_updates
/summit_xl_a/summit_xl_a_front_ptz_camera/parameter_descriptions
/summit_xl_a/summit_xl_a_front_ptz_camera/parameter_updates
/summit_xl_a/summit_xl_hw/emergency_stop
/summit_xl_a/twist_marker
/tf
/tf_static
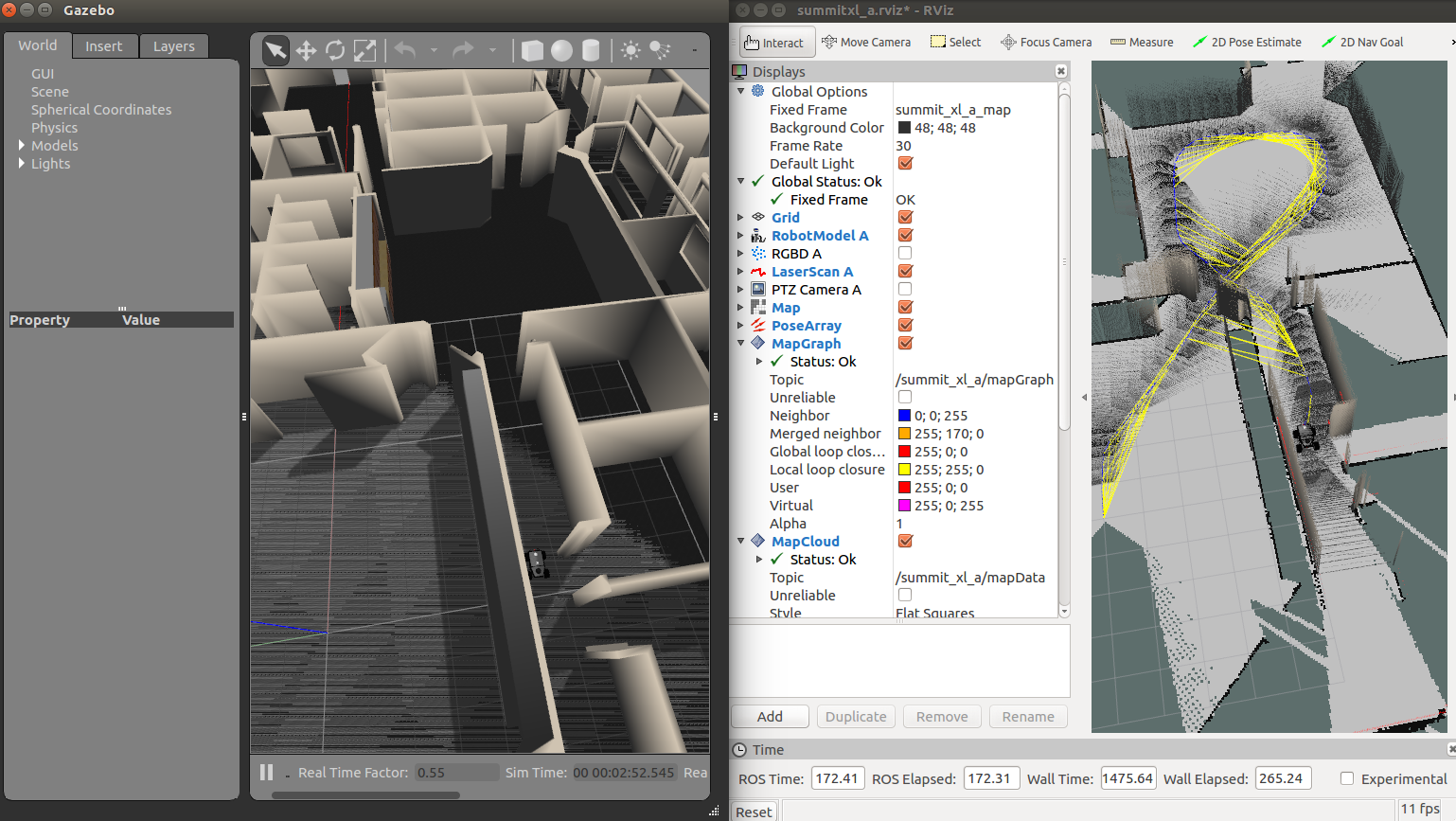
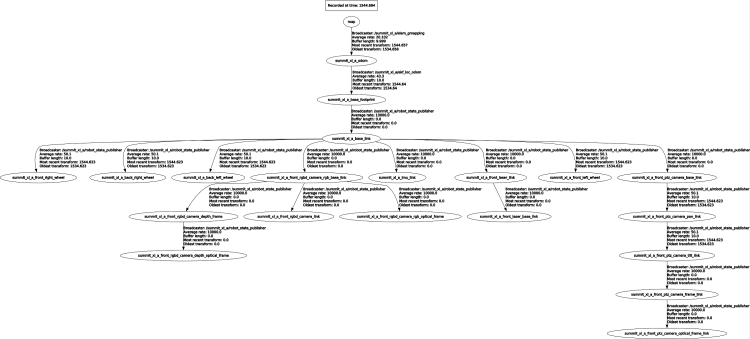
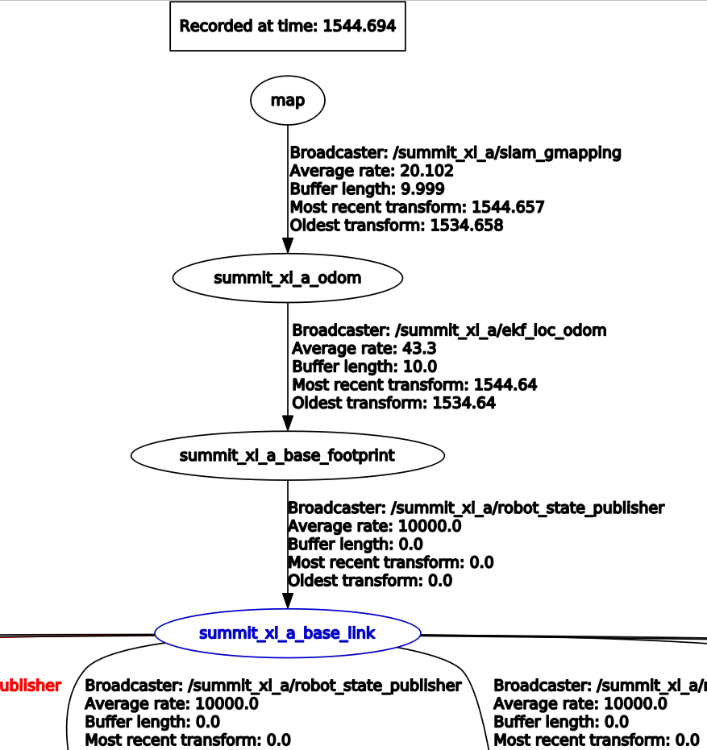
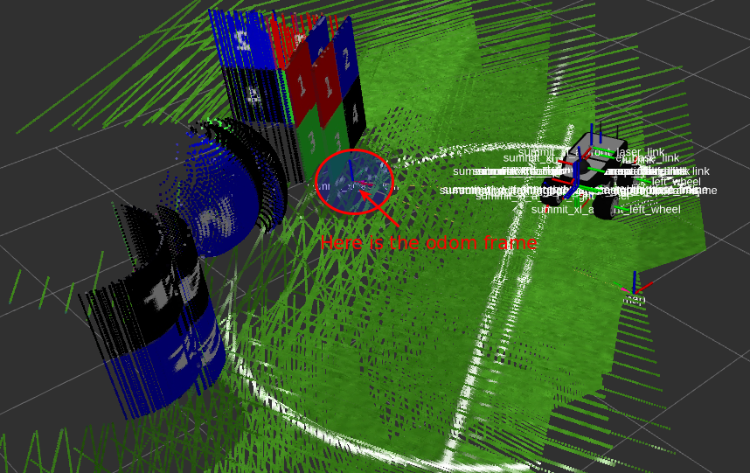
The problem with this, is that [/rtabmap/rtabmap] and [/summit_xl_a/slam_gmapping] are trying to write on [summit_xl_a_odom]
This is what
roswtf says:
Found 2 error(s).
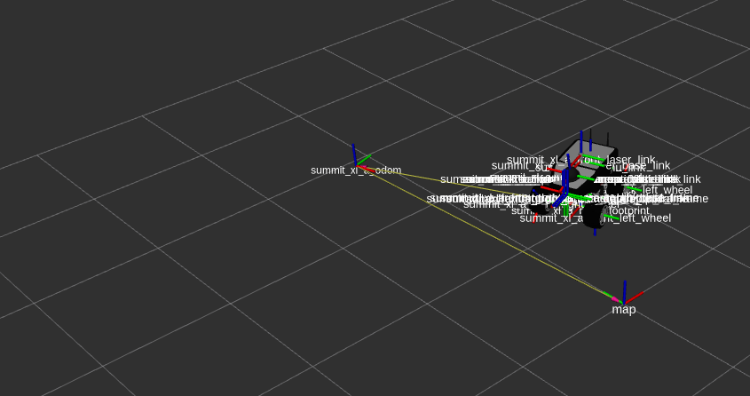
ERROR TF re-parenting contention:
* reparenting of [summit_xl_a_odom] to [map] by [/rtabmap/rtabmap]
* reparenting of [summit_xl_a_odom] to [/map] by [/summit_xl_a/slam_gmapping]
ERROR TF multiple authority contention:
* node [/rtabmap/rtabmap] publishing transform [summit_xl_a_odom] with parent [map] already published by node [/summit_xl_a/slam_gmapping]
* node [/summit_xl_a/slam_gmapping] publishing transform [summit_xl_a_odom] with parent [/map] already published by node [/rtabmap/rtabmap]
- - - - - - - - - -
The other option is to don't use gmapping.
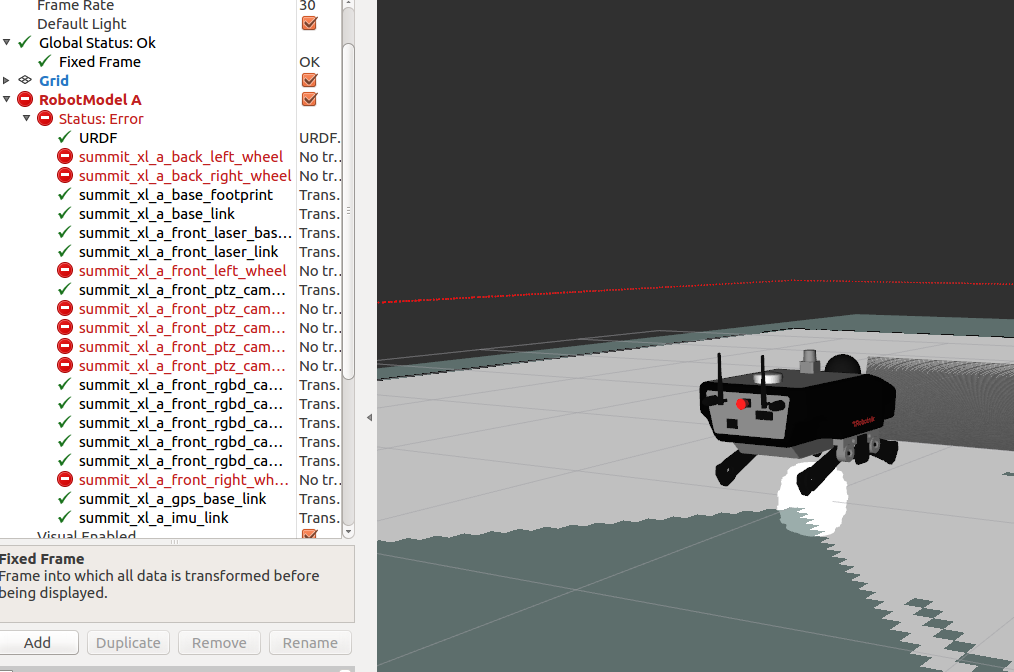
There are no problem with the launchers, but the odom topic is not with all the frames and TFs
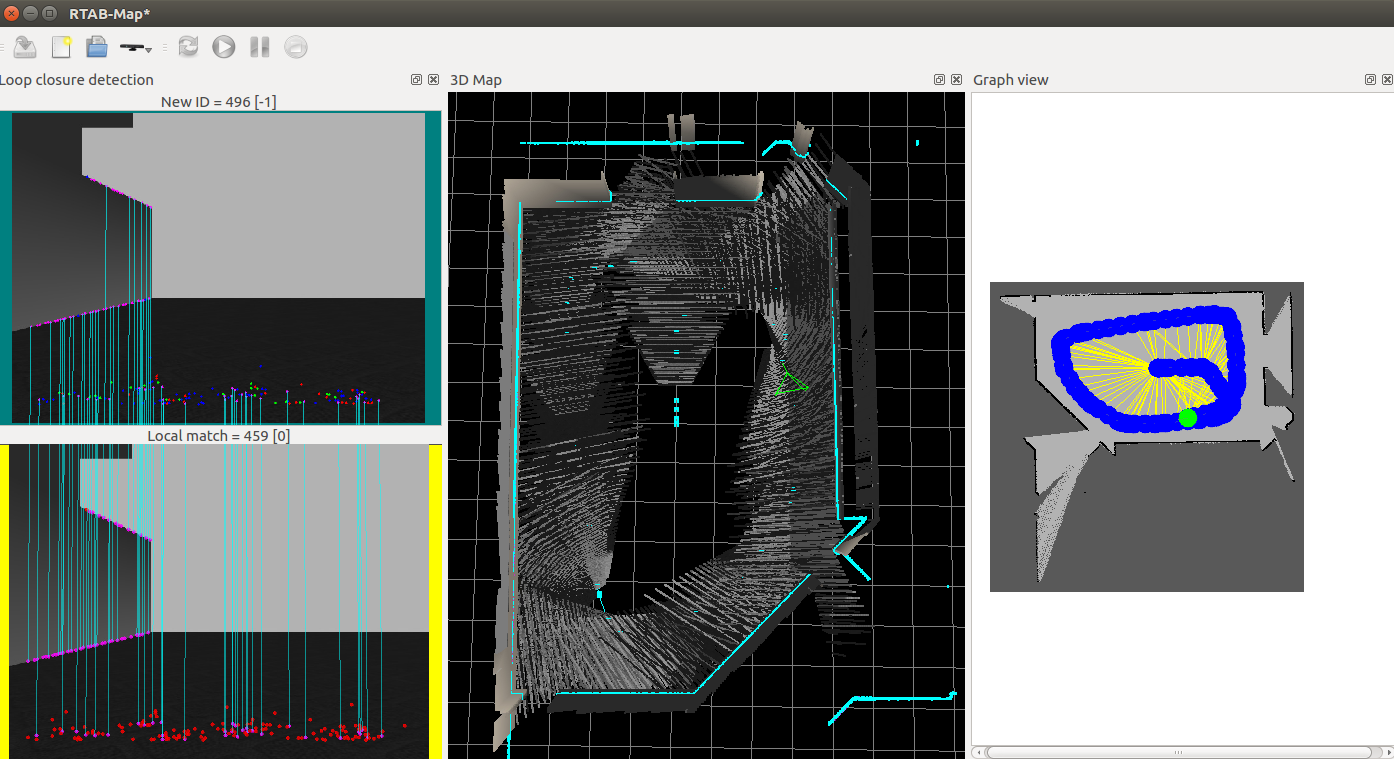
And this is the error
[ WARN] (2018-09-18 12:38:53.491) Rtabmap.cpp:2371::process() Rejecting all added loop closures (3) in this iteration because a wrong loop closure has been detected after graph optimization, resulting in a maximum graph error ratio of 4.197081 (edge 40->41, type=0, abs error=0.360965, stddev=0.086004). The maximum error ratio parameter is 1.000000 of std deviation.
[ WARN] (2018-09-18 12:38:53.491) Rtabmap.cpp:2375::process() Loop closure 156->20 rejected!
[ WARN] (2018-09-18 12:38:53.492) Rtabmap.cpp:2375::process() Loop closure 156->30 rejected!
[ WARN] (2018-09-18 12:38:53.492) Rtabmap.cpp:2375::process() Loop closure 156->140 rejected!