Hello, I tried rtabmap with turtlebot in simulation with simulated kinect, and everything worked pretty fine.
Then I put ZED camera on a real turtlebot and tried to do mapping in larger indoor space, but result is kinda noisy.
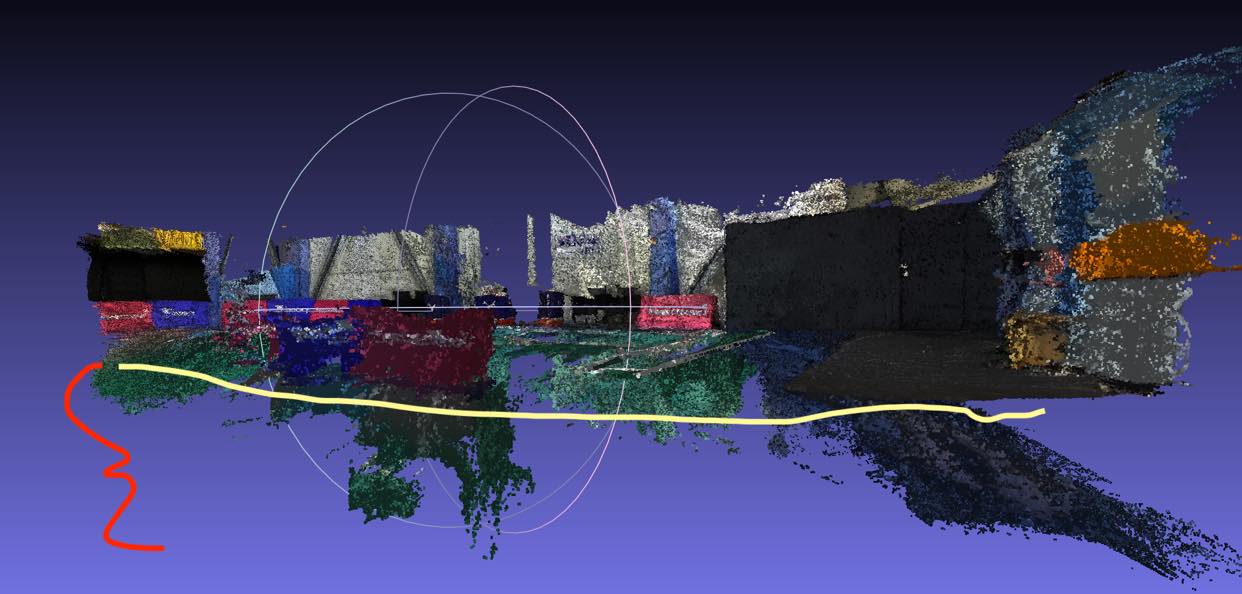
This is pointcloud generated from database, and lot of points are below floor, i.e. the pointclouds generated by camera are bad.
I've read on the zed page that indoor mapping is limited but I did not expect it to be this bad.
I have calibrated the camera and will try it tomorrow again.
I used your rtabmap turtlebot launchfile combined with zed one.
My question is, how to you cope with noisy sensor? Put the pointcloud through some filter before it goes to rtabmap?
I don't have available RGB-D sensor like intel realsense, but I guess it has noise too.

