I want to run standalone Linux app with two RGBD cameras. I followed this post -
link.
First I confirmed that I can create valid SensorData for a single camera and post event to Rtabmap, and I get valid 3D pointlcoud and poses when the camera moves. All good.
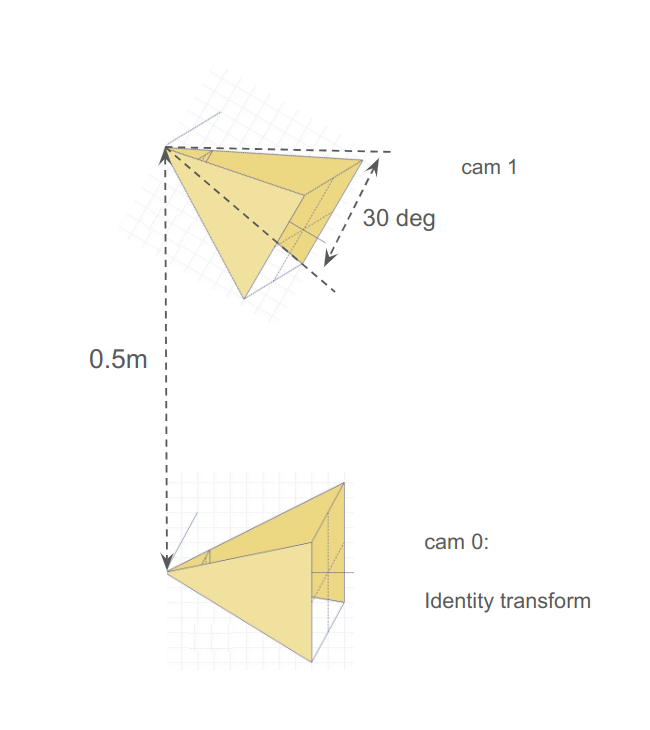
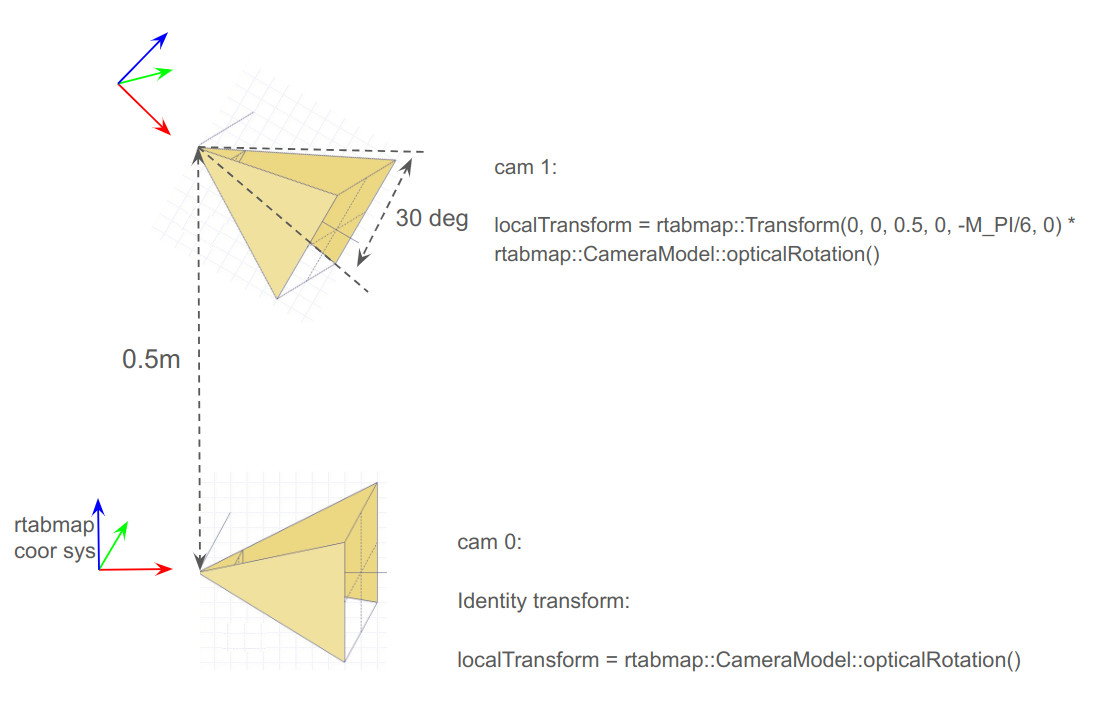
Then to start with two cameras code, I stitched two same rgb images horizontally and two same depth images horizontally. Captured from same depth camera (realsense), just duplicated. In the camera model localTransform is rtabmap::CameraModel::opticalRotation() for both models. so this is as if the two cameras are located in exactly same spot.
After running this, I see immediately from the log that the tracking is lost.
[2024-10-23 13:11:05.207192] [info] [framework/realsensegrabber.cpp] [144] [] [] Camera 153122070967 sent to SLAM.
[ INFO] (2024-10-23 13:11:05.242) OdometryF2M.cpp:1423::computeTransform() Odom update time = 0.034782s lost=false features=947 inliers=0/0 variance:lin=9999.000000, ang=9999.000000 local_map=947 local_scan_map=0
[2024-10-23 13:11:05.272345] [info] [framework/realsensegrabber.cpp] [144] [] [] Camera 153122070967 sent to SLAM.
[ INFO] (2024-10-23 13:11:05.304) RegistrationVis.cpp:1677::computeTransformationImpl() Not enough inliers 0/20 (matches=11) between -1 and 2
[ INFO] (2024-10-23 13:11:05.304) OdometryF2M.cpp:1423::computeTransform() Odom update time = 0.032439s lost=true features=897 inliers=0/11 variance:lin=1.000000, ang=1.000000 local_map=947 local_scan_map=0
[2024-10-23 13:11:05.435172] [info] [framework/realsensegrabber.cpp] [144] [] [] Camera 153122070967 sent to SLAM.
[ INFO] (2024-10-23 13:11:05.464) RegistrationVis.cpp:1677::computeTransformationImpl() Not enough inliers 0/20 (matches=12) between -1 and 3
[ INFO] (2024-10-23 13:11:05.465) OdometryF2M.cpp:1423::computeTransform() Odom update time = 0.031977s lost=true features=906 inliers=0/12 variance:lin=1.000000, ang=1.000000 local_map=947 local_scan_map=0
Also I did not modify anything in how the odometry, rtabmap thread created/run (do I need to?)
Whats the correct way of running two cameras? Is it possible to get it running with toy example of duplicating same data? I'm looking for the simplest way to run the two cameras SLAM code and build up from there (to real 2nd camera data and real transform). Will appreciate any advice
Thanks,
Jenna