Hi Mathieu,
Thank you for your response. Here’s an update on my progress with ROS 2 Jazzy and the new Gazebo simulator:
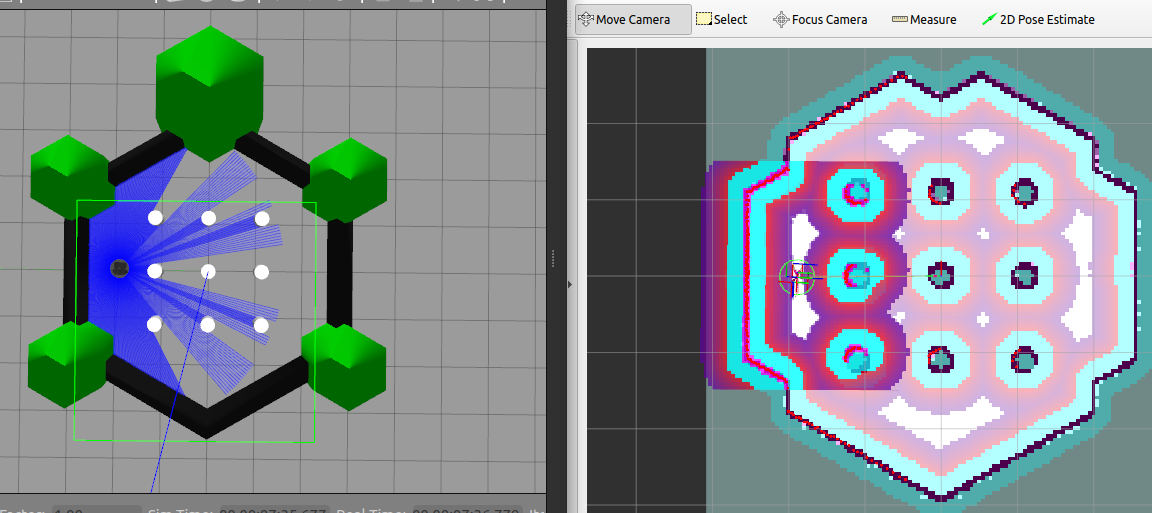
1. 2D Pose Estimate: Works correctly for setting the robot’s initial pose.
2. RGBD/StartAtOrigin: Setting this to True works perfectly; the robot now spawns at the origin in RViz.
3. Autonomous Navigation Issue with TurtleBot3: I’ve adjusted the minimum LiDAR scan value to 0.2, but autonomous navigation still fails when a goal pose is given. Interestingly, navigation works correctly when I use the
MOBO_BOT package (which includes a complete robot description and navigation scripts).
I’ve identified two key differences so far:
## MOBO_BOT includes a gz_bridge parameter file, which appears necessary for compatibility with the new Gazebo simulator.
## The default Nav2 configuration, when used with Turtlebot_3, publishes only to the cmd_vel_nav instead (nothing is published on the cmd_vel topic), and the messages are not timestamped. The new Gazebo simulator requires the twist messages to be timestamped and on the cmd_vel topic. I hope to share more updates when I get it working with turtlebot_3 on the new Gazebo simulator and ROS2 Jazzy.
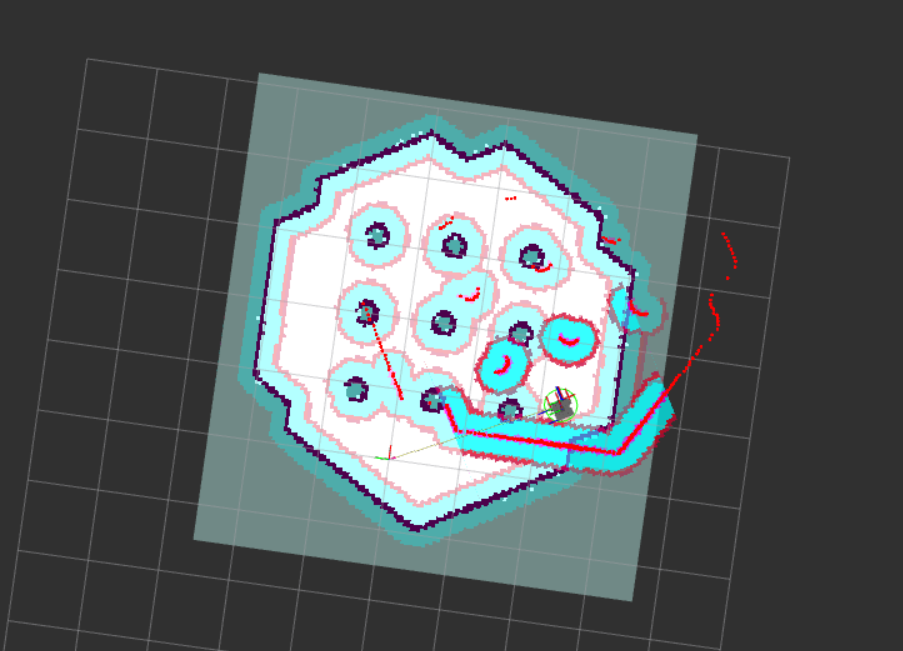
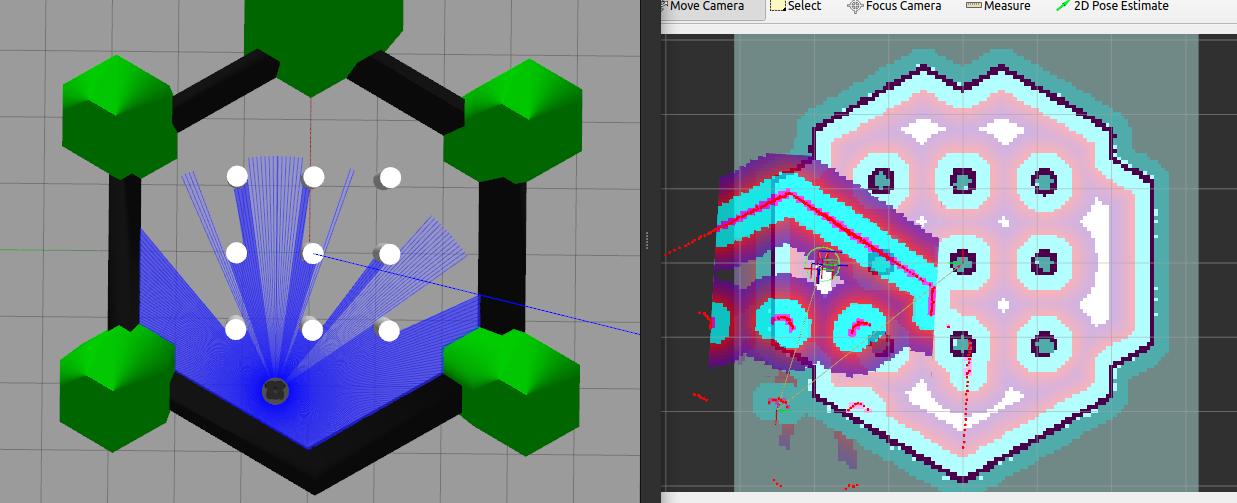
4. Finally, when working with 2D LiDAR SLAM, I experimented with setting the 'use_rgb' parameter to 'true', and it eliminated/reduced drift significantly after loop closures.