Hello Mathieu,
Thank You for your response.
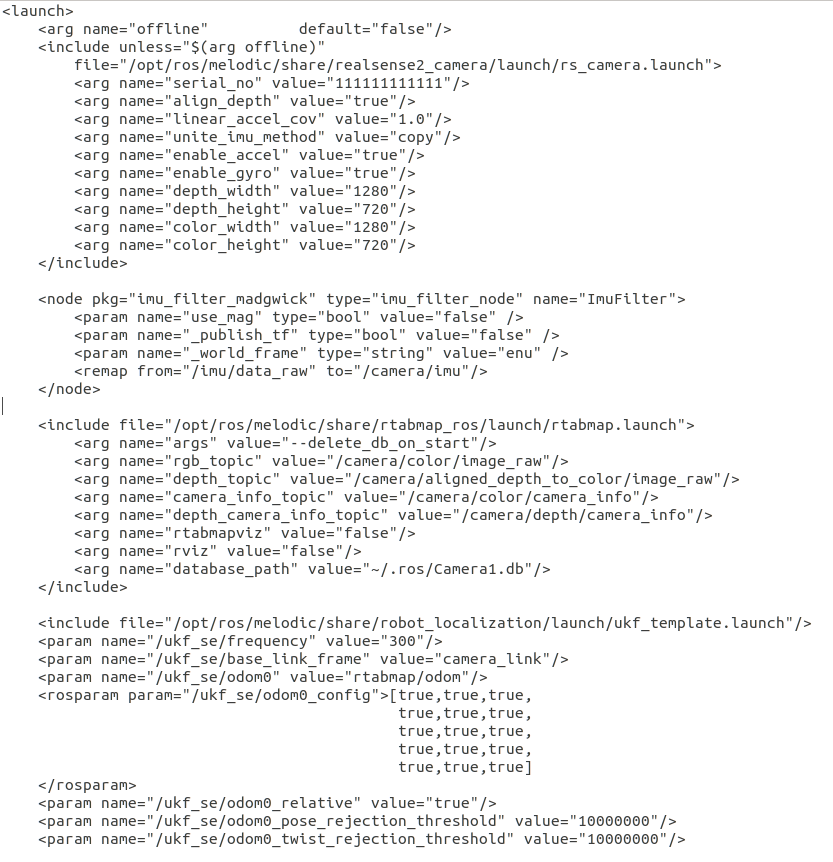
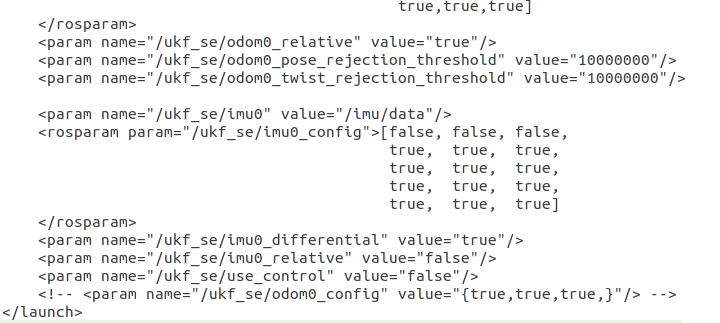
So I tried adding the namespaces to the launch file as you've recommended, but I think I still have a problem with the second part of your problem.
This is my edited launch file:


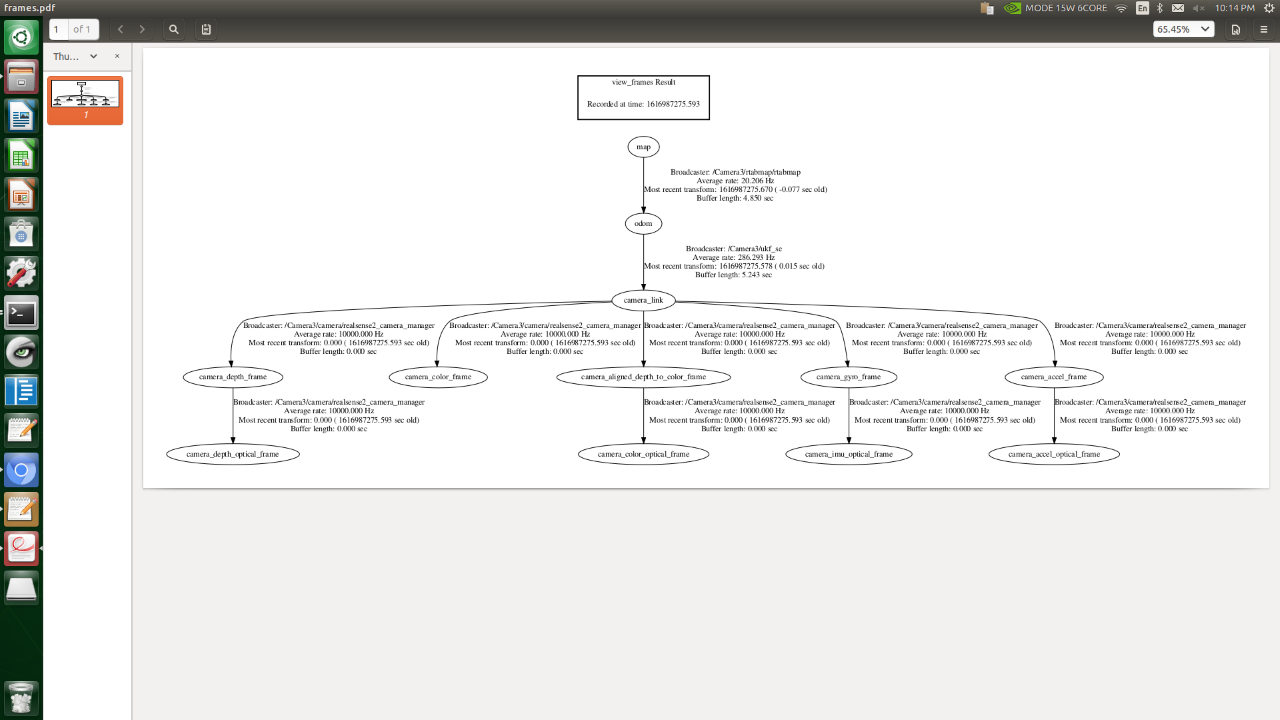
When I run the "tf view_frames" everything still looks like what I originally had for one camera.
Original open_source tracking:
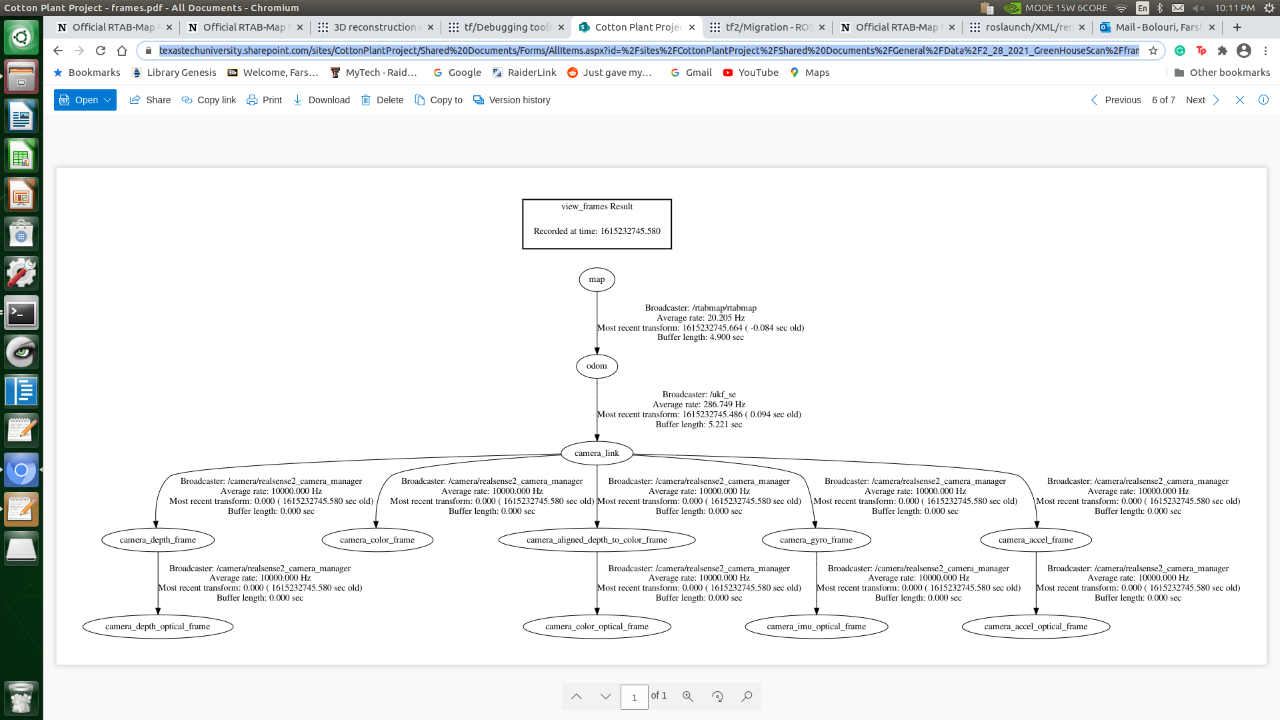
---------------------------------------------------------------
Current Edited launch file:
--------------------------------------------------------------------------
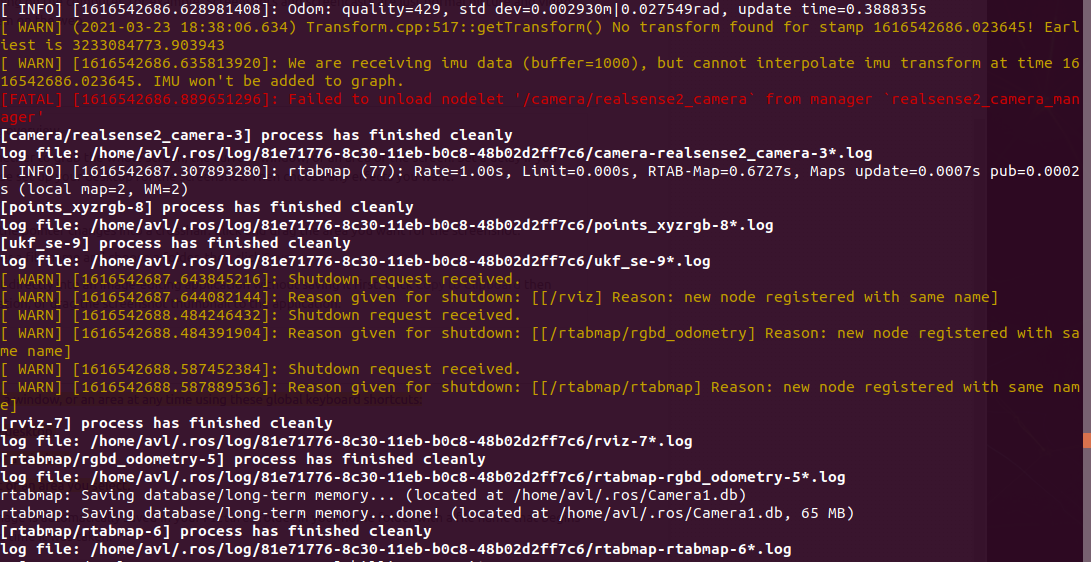
However, when I run "rqt_graph" I can see a few issues:
Original open_source tracking:
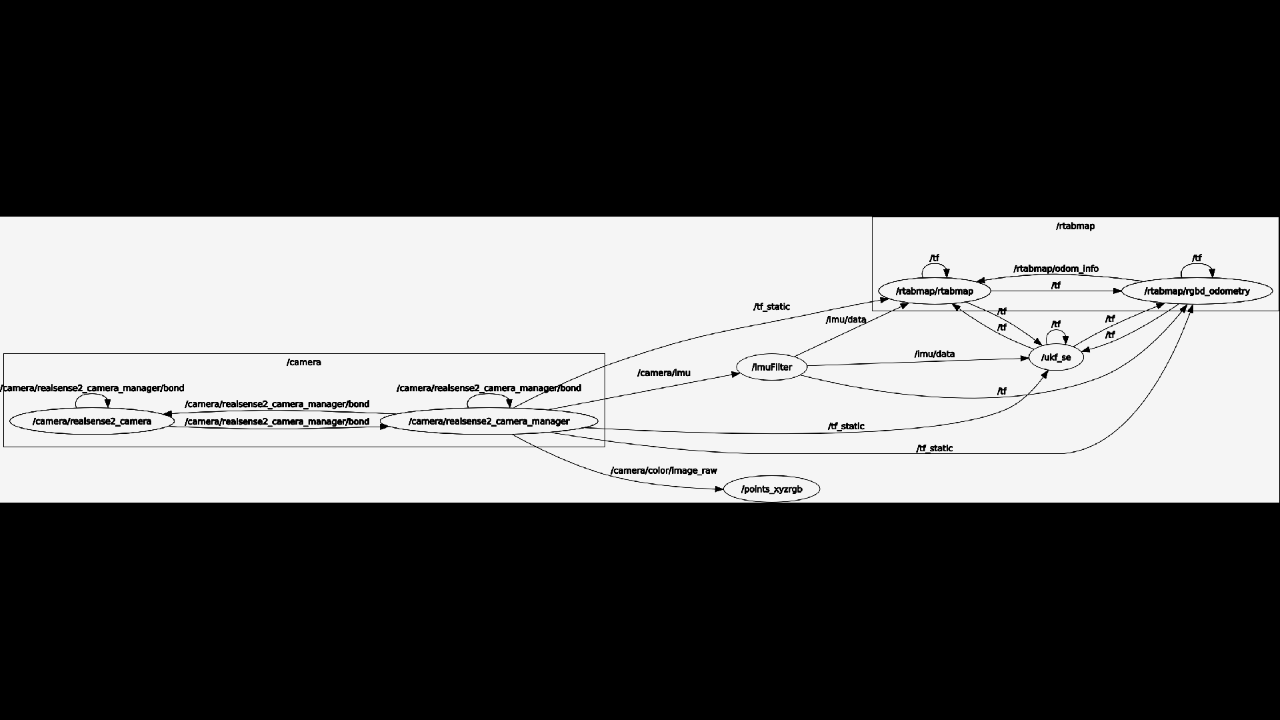
-----------------------------------------------------------------
Current Edited launch file:
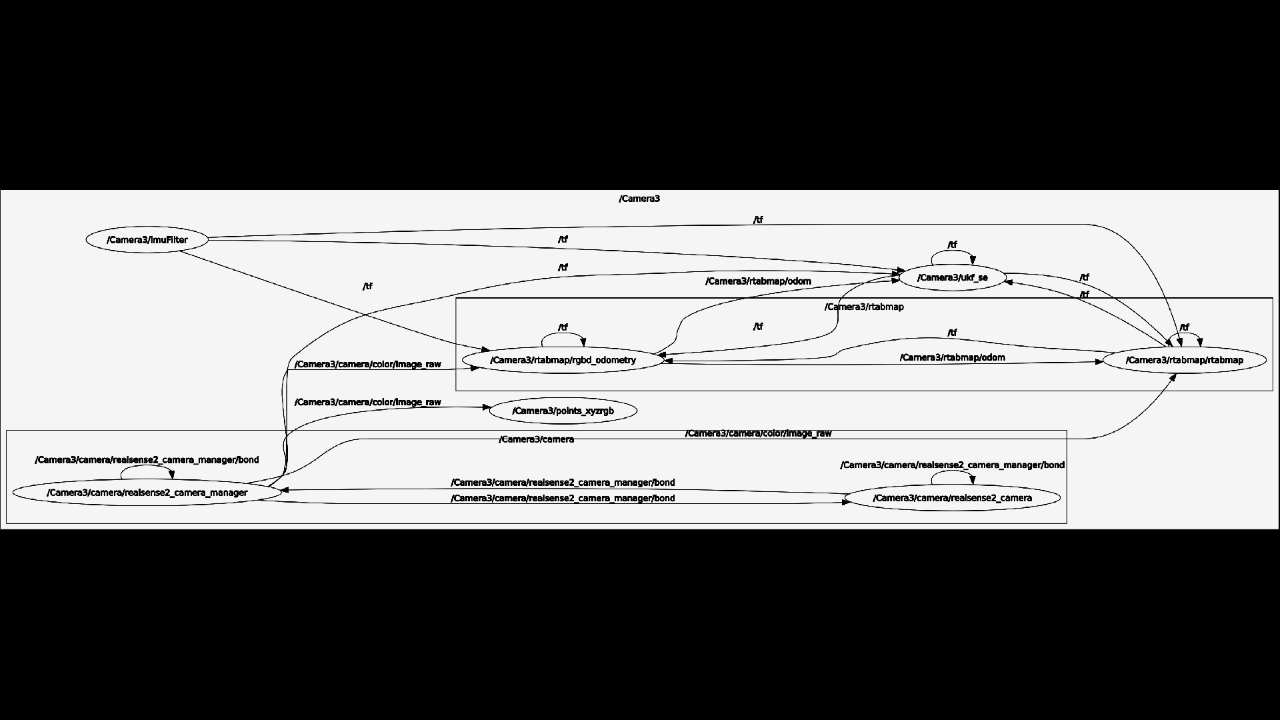
------------------------------------------------------------
The main differences that I see is that:
I don't see any camera/imu being published.
I don't see any /tf_static being published.
I am not sure but I thought the "/tf"s should also be published as "/Camera3/tf".
With regards to the second issue you mentioned about map_frame_id, I am still having a little bit of an issue.
Based on some other posts I read on this forum, I added these lines to the launch file:
""
<arg name="frame_id" value="Camera3/camera_link"
<arg name="map_frame_id" value="Camera3/map">
""
But I don't think they are correct as I lose the map and odom node in the "tf view_frames".
Thank You