Hi,
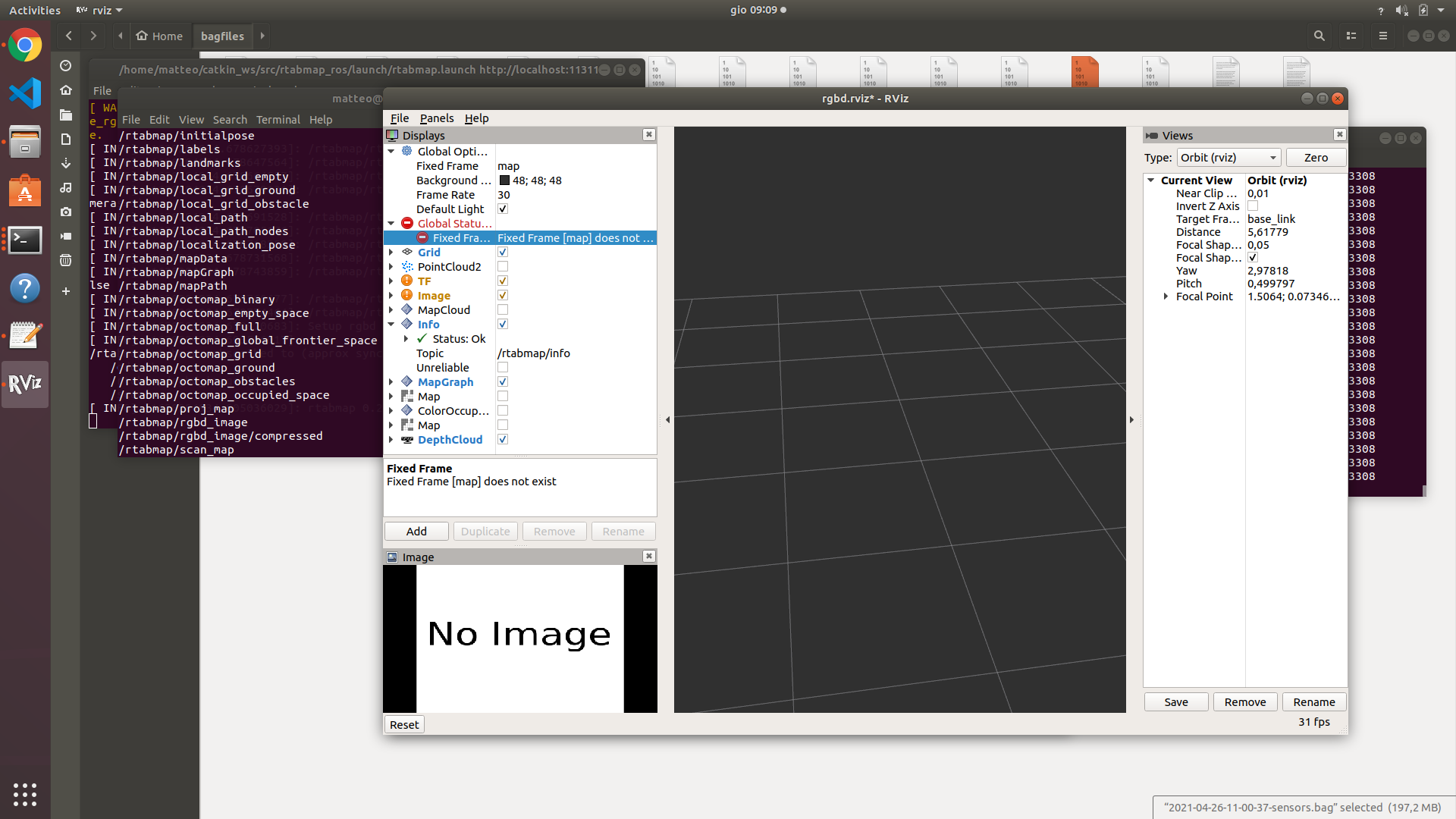
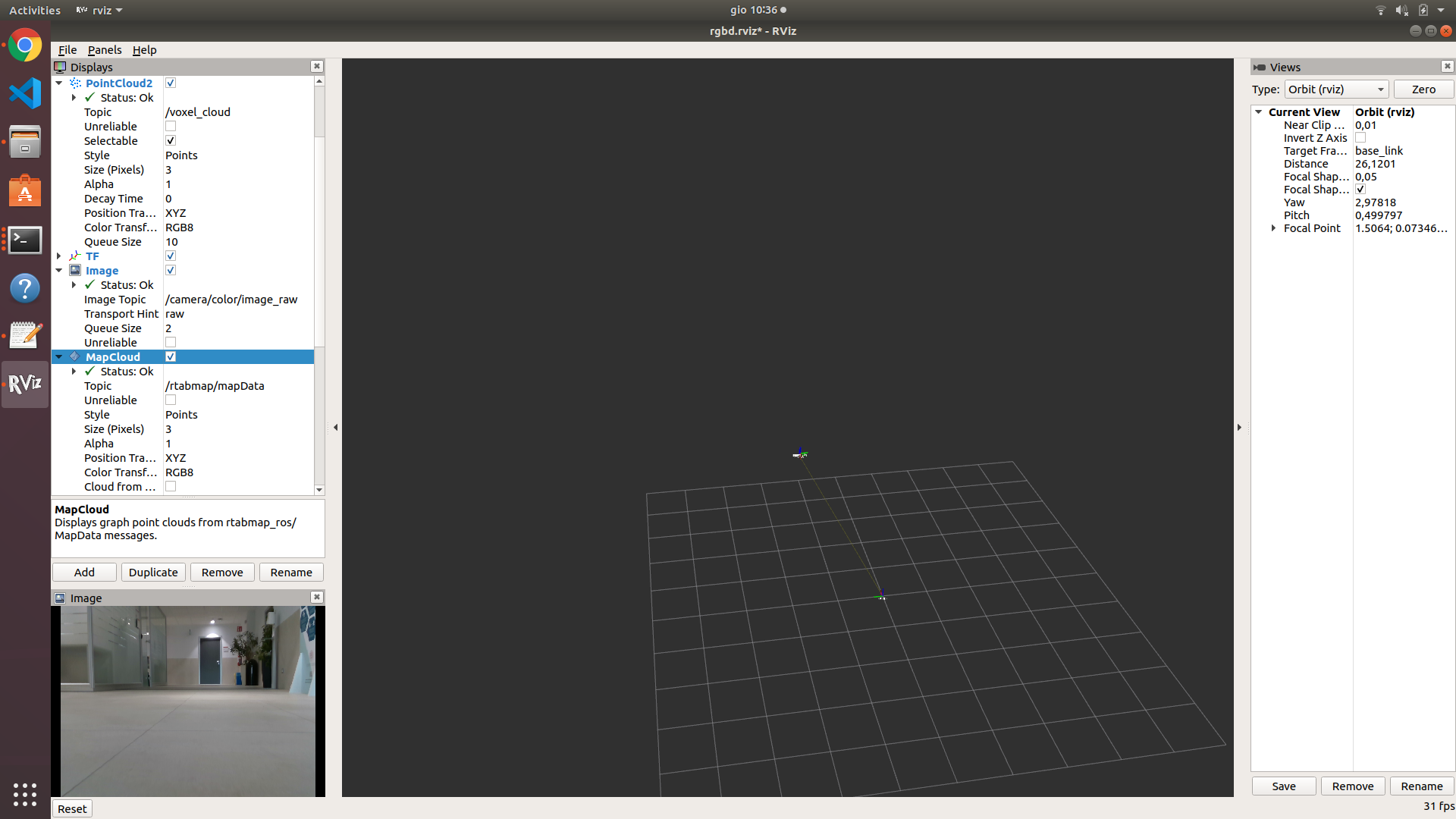
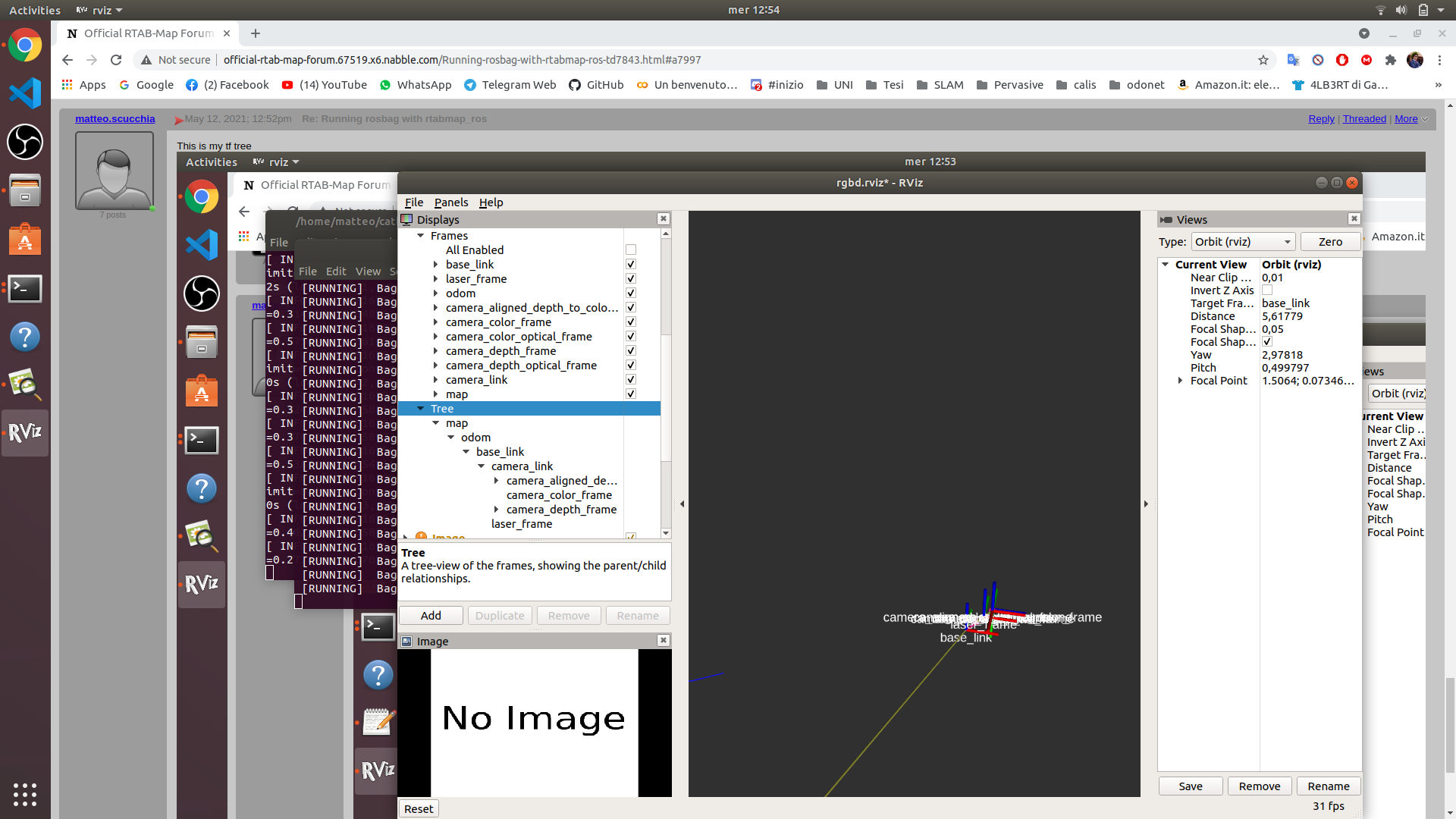
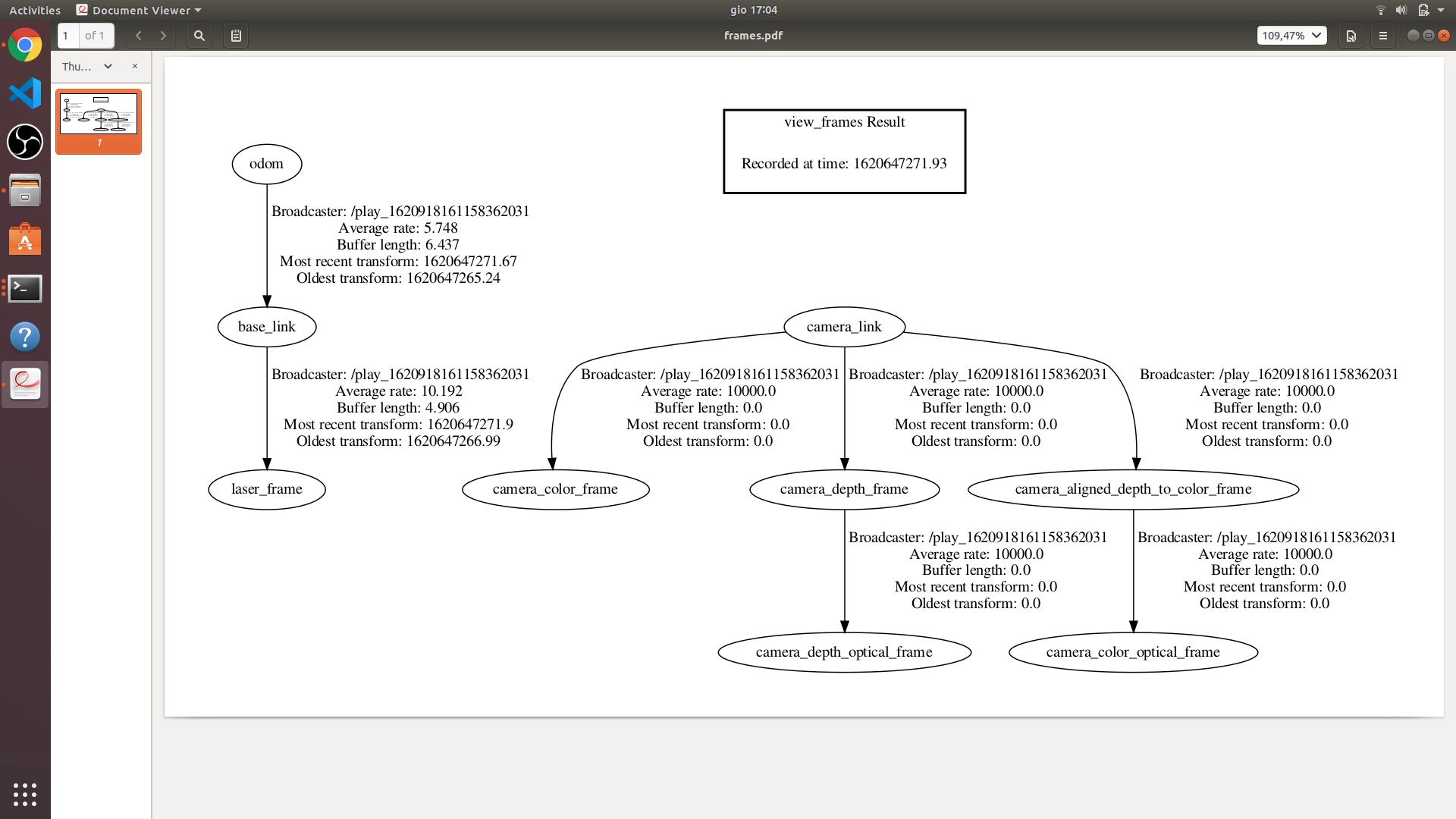
thank you for the reply! The problem was in rosbag registration, now i've solved! Now rtabmap creates the map point cloud, but not the occupancy grid, in fact it returns this error while started.
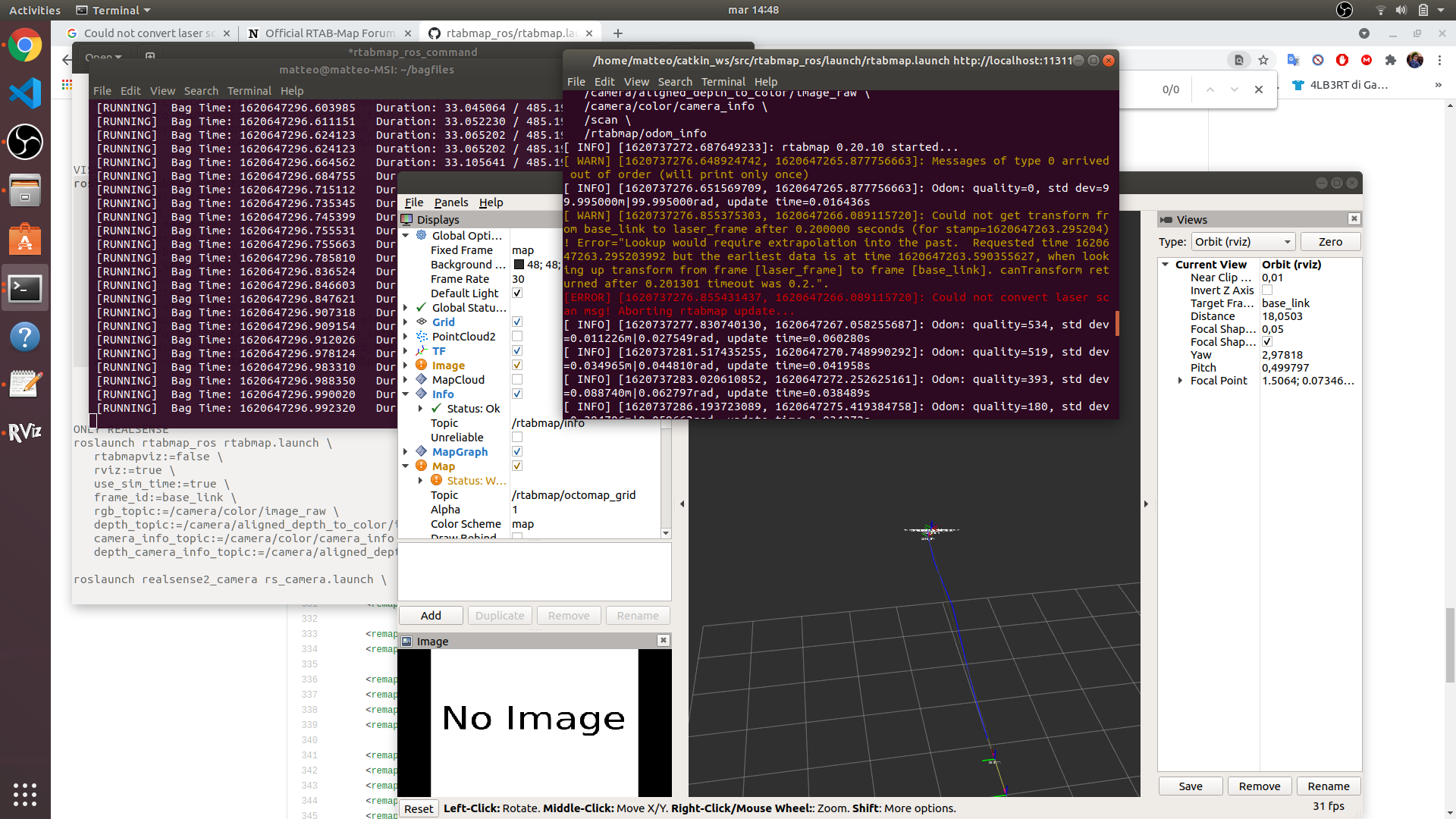
I've got a rotation lidar that make the 360° laser scan of a single line. The command that I use to launch rtabmap is
roslaunch rtabmap_ros rtabmap.launch \
rtabmapviz:=false \
rviz:=true \
use_sim_time:=true \
queue_size:=100 \
frame_id:=base_link \
subscribe_scan:=true \
odom_topic:=/odom \
scan_topic:=/scan \
rgb_topic:=/camera/color/image_raw \
depth_topic:=/camera/aligned_depth_to_color/image_raw \
camera_info_topic:=/camera/color/camera_info \
depth_camera_info_topic:=/camera/aligned_depth_to_color/camera_info \
args:="-d --Reg/Strategy 0 --RGBD/NeighborLinkRefining true"
Do you know the cause of this error?
Thanks in advance