There is a statistic in Statistics panel that give the the current pose of the robot:
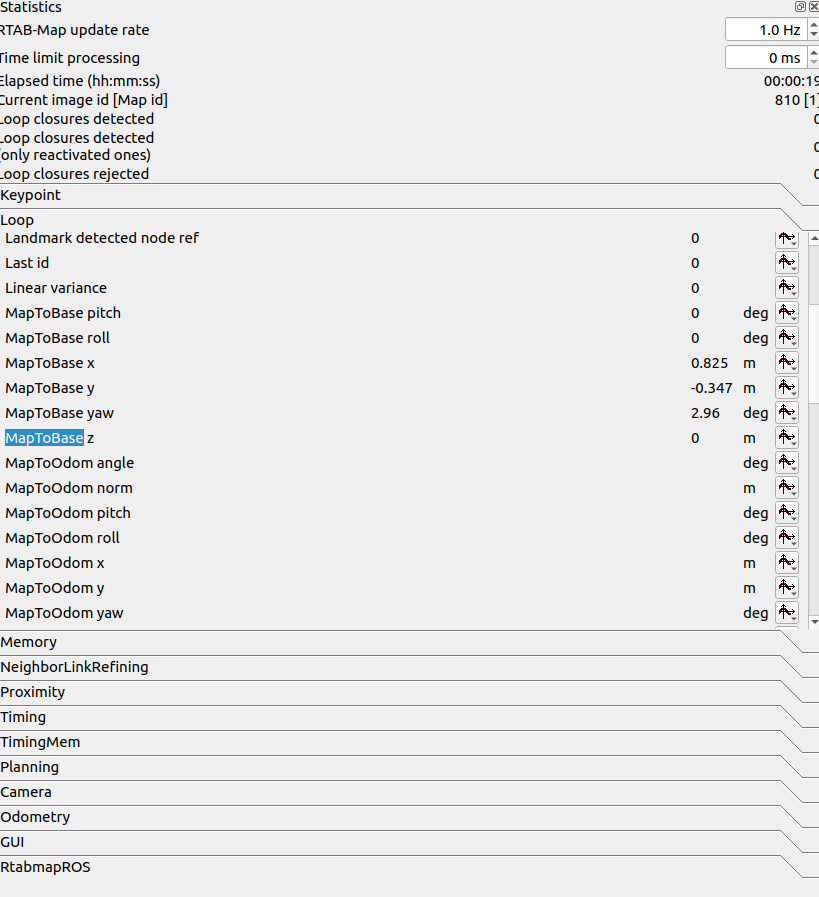
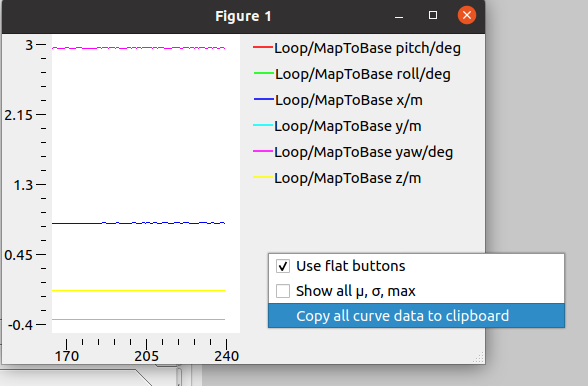
You can plot them (x,y,z,roll,pitch,yaw) in a figure, then in the figure you can copy/paste the resulting data to clipboard so you can have all the poses.
x Loop/MapToBase pitch/deg Loop/MapToBase roll/deg Loop/MapToBase x/m Loop/MapToBase y/m Loop/MapToBase yaw/deg Loop/MapToBase z/m
0.061283 0.000000 0.000000 0.824576 -0.347399 2.956175 0.000000
1.061828 0.000000 0.000000 0.824672 -0.347239 2.958014 0.000000
2.062373 0.000000 0.000000 0.824830 -0.347251 2.952559 0.000000
3.062918 0.000000 0.000000 0.824864 -0.347533 2.957227 0.000000
4.063463 0.000000 0.000000 0.824732 -0.347619 2.951538 0.000000
5.064008 0.000000 0.000000 0.824636 -0.347237 2.956615 0.000000
6.098099 0.000000 0.000000 0.824964 -0.347225 2.958956 0.000000
7.098644 0.000000 0.000000 0.824623 -0.347235 2.962220 0.000000
8.099189 0.000000 0.000000 0.824656 -0.347352 2.951769 0.000000
9.099734 0.000000 0.000000 0.824676 -0.347416 2.952874 0.000000
10.133630 0.000000 0.000000 0.824952 -0.347423 2.958404 0.000000
11.200878 0.000000 0.000000 0.825046 -0.347313 2.958549 0.000000
12.201423 0.000000 0.000000 0.824939 -0.347035 2.959143 0.000000
13.201968 0.000000 0.000000 0.825034 -0.347282 2.959235 0.000000
14.202513 0.000000 0.000000 0.824763 -0.347403 2.954526 0.000000
15.203057 0.000000 0.000000 0.824814 -0.347314 2.958415 0.000000
16.203602 0.000000 0.000000 0.824876 -0.347456 2.958884 0.000000
17.237499 0.000000 0.000000 0.824738 -0.347742 2.955909 0.000000
18.304747 0.000000 0.000000 0.824555 -0.347285 2.947679 0.000000
19.338643 0.000000 0.000000 0.824632 -0.347604 2.957663 0.000000
20.339188 0.000000 0.000000 0.824688 -0.347145 2.957339 0.000000
21.373085 0.000000 0.000000 0.824486 -0.347450 2.956482 0.000000
22.373375 0.000000 0.000000 0.824886 -0.347248 2.957995 0.000000
Other way is to do localization under ROS, so that you could get TF map->base_link each time it re-localizes.

