Thank Mathieu! You are right. This machine did not have GTSAM. Now the issue has been solved by installing GTSAM.
I collected another dataset in this area. For this test, I used the following commands:
$ roslaunch kinect2_bridge kinect2_bridge.launch publish_tf:=true
$ roslaunch rtabmap_ros rgbd_mapping_kinect2_horizontal.launch
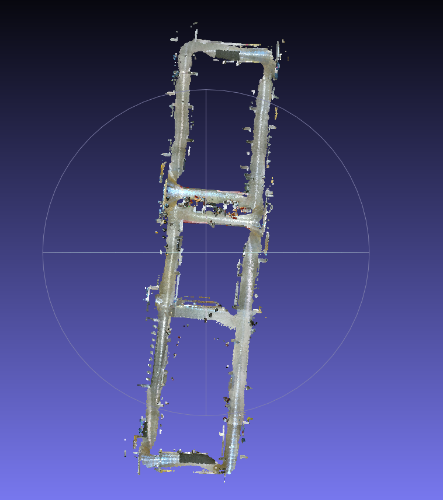
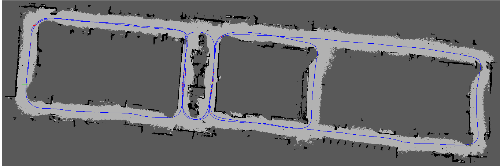
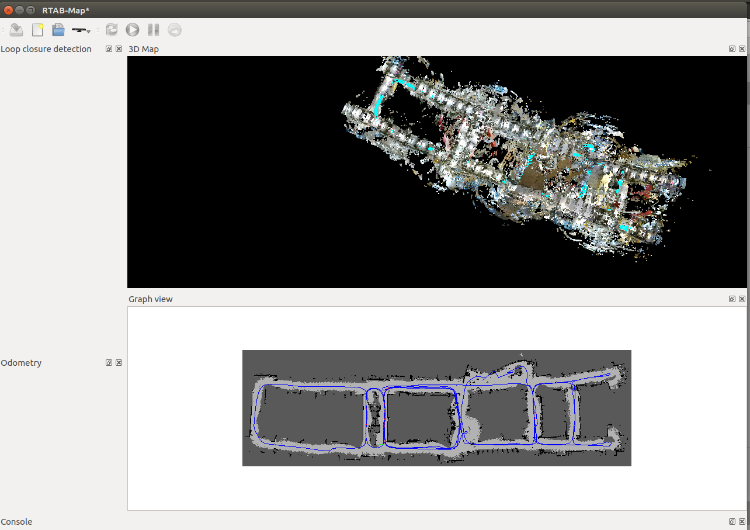
rgbd_mapping_kinect2_horizontal.launchThe real-time result by using kinect v2 only is amazing to me consider the environment:
However, when I tried to use the same dataset to obtain the same result in post-processing, I met two issues (here is the database:
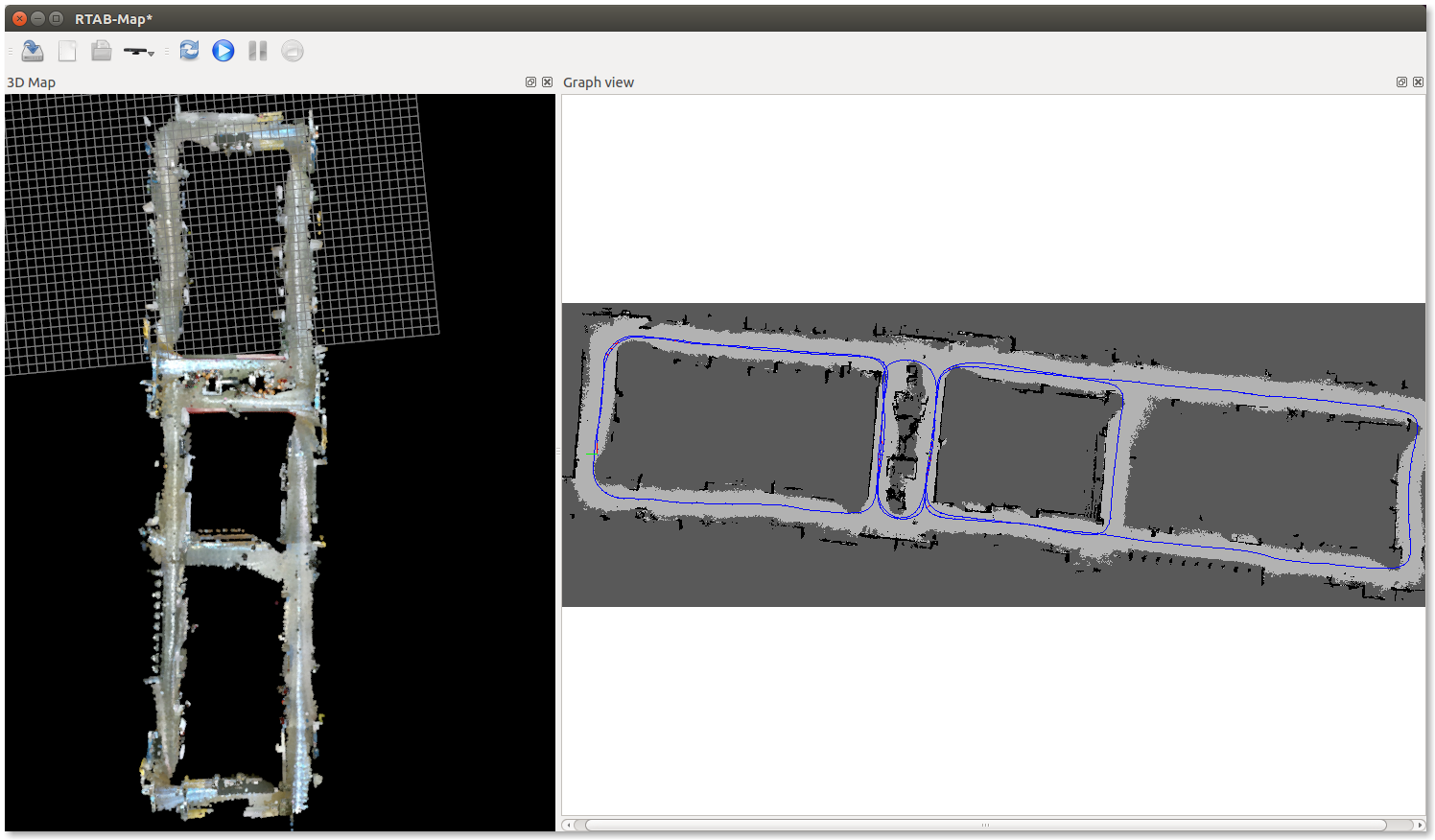
https://mega.nz/#!g8IEAJjQ!Q4RtQTSfySWv4ddyD3EVsJ6Y3_zCcuTb2_lzzCtKhqY):1. I run the database in RTABMAP, and finally the process completed at follows:
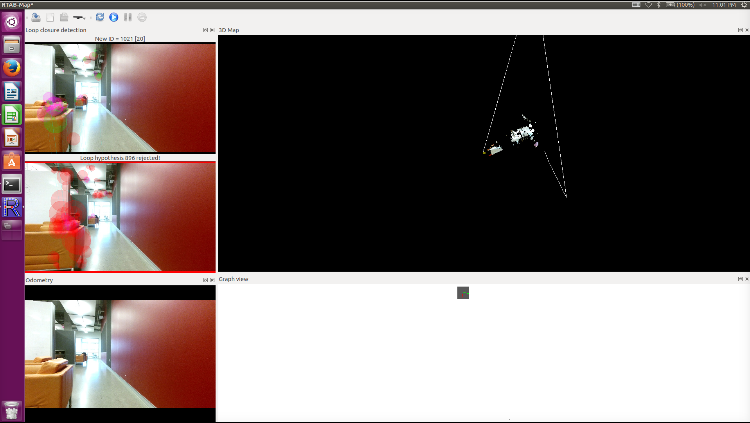
I believe all the mapping results are in the memory, because if I run other dataset, the previous mapping result may appear when a loop is detected. However, no matter I click "Download graphs only" or "Download all clouds", I could not show the full mapping results. So is there anything I missed to get the whole mapping result from this?
2. I run the above database as well as this one (
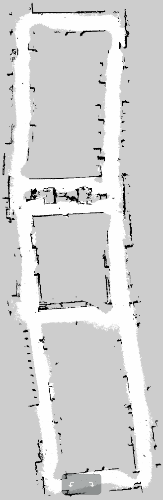
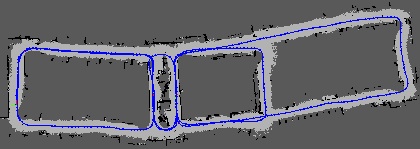
https://mega.nz/#!YgoASKhT!H4leMDsdbNJ9z3SKNc-vhXGPlsIPPmwOYFlECJxA-0g) as the second database. However, the result is not as reliable as the ones I obtained in real time. Here is the snapshot of the final result:
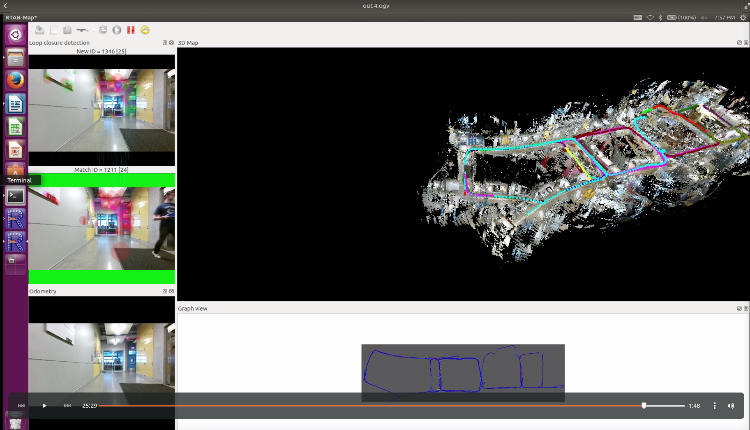
And here is a video that records the data processing process:
https://mega.nz/#!04oxVACK!zcNl7rnCRXwuSx5czADjK6BfOEO_lMvAsAUHbITMQ8II directly used the default setting of RTABMAP (by clicking "reset all settings"), and changed "Graph Optimization" to "TORO" (because "g2o" missed many loop detections, and led to drifts; "GSTAM" met some calculation problem). Also, the 2D transform was forced.
So it is kind of strange that the post-processing result is even worse than the real-time one. Do you have any suggestions on this dataset?
By the way, if there is a setting of multiple times speed for data processing, that would be great.

Best regards,
You Li