Hi,
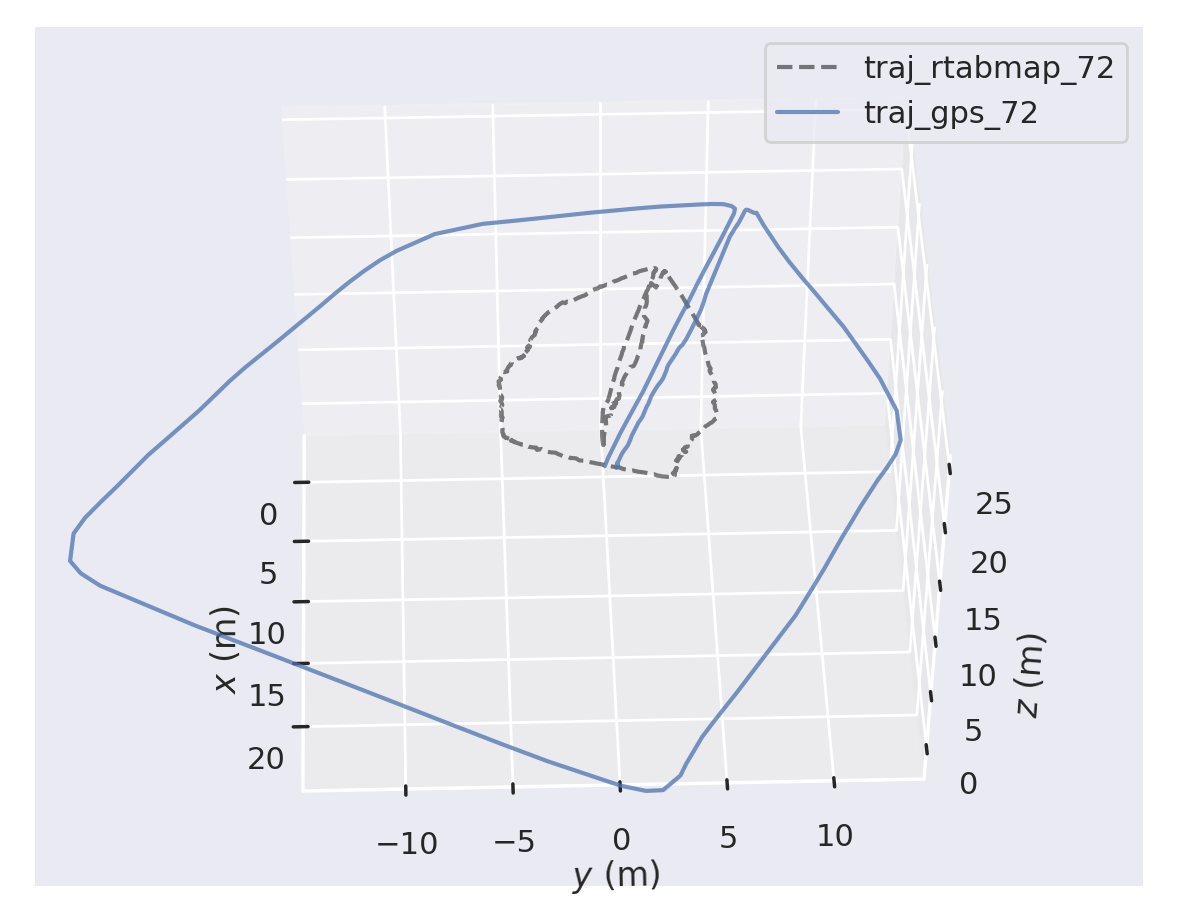
To make sure, this is the trajectory computed by rtabmap's odometry, not zed's odometry. The scale of the trajectory will depend one the camera calibration (focal distance) or baseline between the cameras (in stereo mode) or scaled depth values (rgb-d mode).
Can you evaluate the scale error? I tried all zed examples from those pages (
http://wiki.ros.org/rtabmap_ros/Tutorials/HandHeldMapping,
http://wiki.ros.org/rtabmap_ros/Tutorials/StereoHandHeldMapping) and the scale seems okay.
Here are the camera info on my zed2 camera:
$ roslaunch zed_wrapper zed_no_tf.launch
$ rostopic echo /zed_node/left/camera_info
header:
seq: 193
stamp:
secs: 1635951065
nsecs: 500313
frame_id: "zed2_left_camera_optical_frame"
height: 376
width: 672
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [263.1452941894531, 0.0, 374.1166687011719, 0.0, 263.1452941894531, 188.2142333984375, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [263.1452941894531, 0.0, 374.1166687011719, 0.0, 0.0, 263.1452941894531, 188.2142333984375, 0.0, 0.0, 0.0, 1.0, 0.0]
$ rostopic echo /zed_node/right/camera_info
header:
seq: 77
stamp:
secs: 1635950993
nsecs: 444169313
frame_id: "zed2_right_camera_optical_frame"
height: 376
width: 672
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [263.1452941894531, 0.0, 374.1166687011719, 0.0, 263.1452941894531, 188.2142333984375, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [263.1452941894531, 0.0, 374.1166687011719, -31.415287017822266, 0.0, 263.1452941894531, 188.2142333984375, 0.0, 0.0, 0.0, 1.0, 0.0]
To compute the baseline, do -P[0,3]/P[0,0] on right camera_info, which in this case is -(-31.415)/263.145 = 0.119 (it should be close to 12 cm)