I was looking this link
https://www.youtube.com/watch?v=_qiLAWp7AqQIt seems that some of my issues may be settings related to loop closure detection?
At the suggestion of some of my friends at the makerspace I belong to I tried a few things that seems to have improved things a pit. Since the interior is smooth and uniformly colored I added some blue tape to the interior. I also mounted the kinnect on a tripod and did a 360 scan which seemed to improved things immensely, but that means I need to stitch the scans together in meshlab.
This is very interesting software. Thank you for creating it.


 Hello, I just started using Rtab-map over the weekend and I still have huge amount to learn.
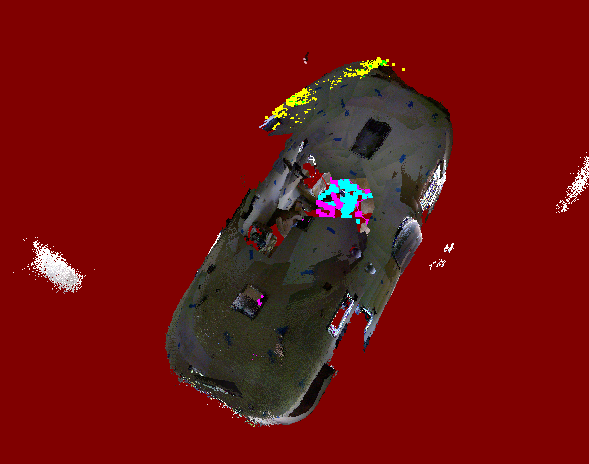
My wife (and I) are gutting a 1965 airstream to restore it. We are down to the bare walls and I added blue tape markers for the software to pick up some references when scanning.
It seems that if I go back to fill in a hole, I get this weird drift. I'm not sure at this point what I'm doing wrong. (I'm using a kinnect v1 for the scanner) It seems that some sort of error is being created and I get a new wall instead of appending to the image it seems to create a new one.
I tried running the post process and it doesn't seem to fix anything.
I don't know if it's my scanning technique/ a limitation of what the Kinect can do.
In order to maintain marital bliss, I'm a bit under the gun here. My wife is highly modified to get the airstream down to the studs. Any tips one what I'm doing wrong would be appreciated.
Hello, I just started using Rtab-map over the weekend and I still have huge amount to learn.
My wife (and I) are gutting a 1965 airstream to restore it. We are down to the bare walls and I added blue tape markers for the software to pick up some references when scanning.
It seems that if I go back to fill in a hole, I get this weird drift. I'm not sure at this point what I'm doing wrong. (I'm using a kinnect v1 for the scanner) It seems that some sort of error is being created and I get a new wall instead of appending to the image it seems to create a new one.
I tried running the post process and it doesn't seem to fix anything.
I don't know if it's my scanning technique/ a limitation of what the Kinect can do.
In order to maintain marital bliss, I'm a bit under the gun here. My wife is highly modified to get the airstream down to the studs. Any tips one what I'm doing wrong would be appreciated.