Hey,
Thanks for the reply.
I did the tf based on a measurement in cad. However, i did try to use the calibration method using aruco nodes and the
opencv hand in eye calibration method. I did calibrate it with about 30 different poses, with an aruco marker that is 24,3cm x 24,3cm, do you reckon this could be improved with more poses? I am still experiencing miss-alignment of frames with the l515 with both the calibrated tf's and the measured tf's. With the more accurate pointcloud data and slight miss-alignment, the meshing process turns out to be worse than with the d455.
With the d455, the wall thickness, masks the miss-alignment and I think this is better for meshing with poisson.
Would you recommend using the lidar localization instead, since I am having these issues?
EDIT:
I have tested more and this is now my config:
parameters=[{
'frame_id':'camera_link', # What frame it should track odom from (the loop closure graphics)
'subscribe_scan_cloud':True, # Works well with subscribe_scan_cloud
'subscribe_depth':False, # Saves the cache, but gives bad data
'subscribe_odom_info':False,
'approx_sync':True,
'queue_size':10, # Was 10000, should be 10
'Kp/MaxFeatures': '-1',
'RGBD/LinearUpdate': '0',
'Icp/VoxelSize' : '0.05',
'Icp/MaxCorrespondenceDistance' : '0.1',
'wait_for_transform':0.1}]
remappings=[
('scan_cloud', '/camera/depth/color/points'),
('rgb/image', '/camera/color/image_raw'),
('rgb/camera_info', '/camera/color/camera_info'),
('depth/image', '/camera/depth/image_rect_raw')]
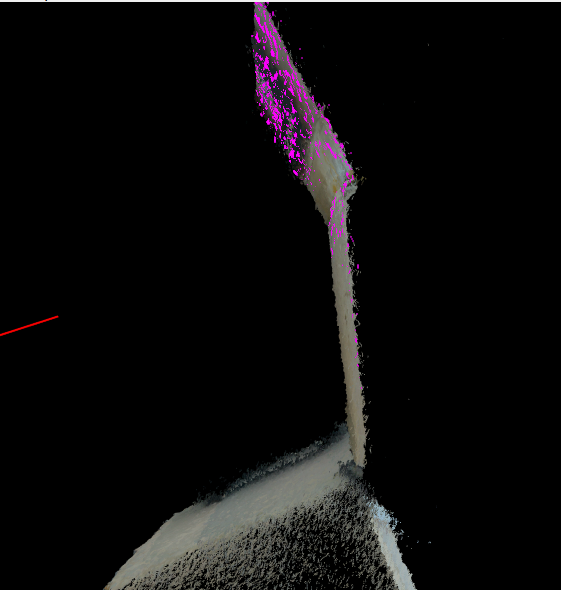
and I get these amazing results which are really flat and consistent, I think it is because it is using ICP from the point cloud loaded with subscribe_scan_cloud:
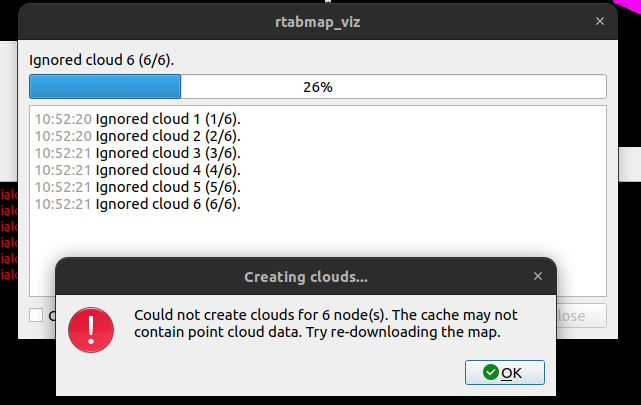
The only downside is that I can't seem to save the map using the GUI because it does not have any point cloud data in the chache. I get this error:
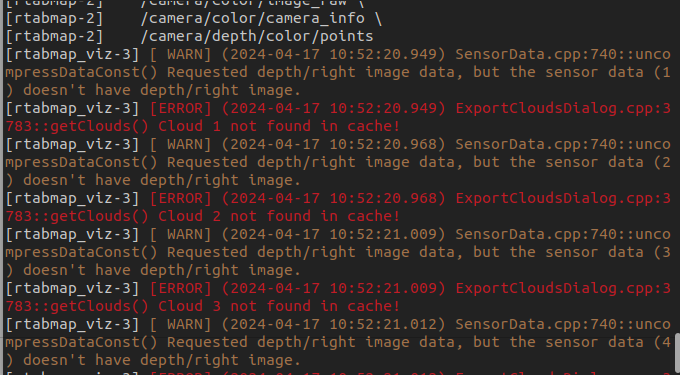
with this error in the command line:
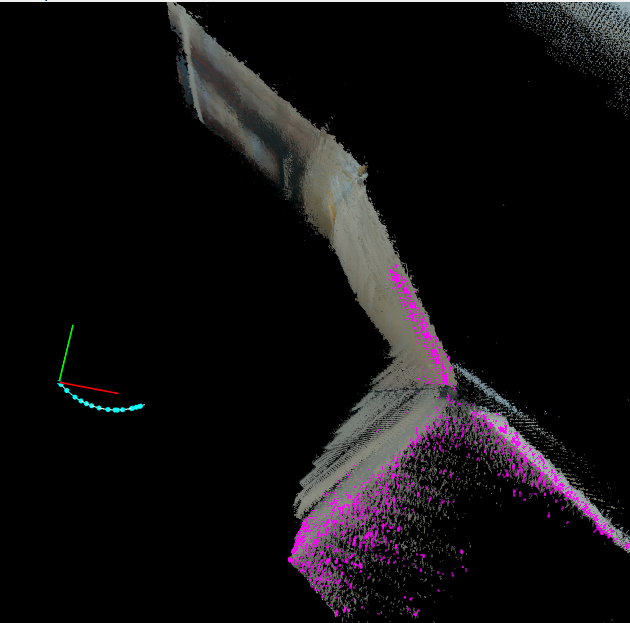
However, if I set subscribe_depth to True, then it will save the pointclouds in the cache, but the result is not the same, as seen below.
Is there a way to save the pointclouds in the cache, but get the same results as when the subscribe_depth is set to false?
EDIT 2:
I got it working properly, the problem was the remapping, i changed the depth image to the aligned depth image and now it is smooth sailing. here is my remappings now.
remappings=[
('scan_cloud', '/camera/depth/color/points'),
('depth/image', '/camera/aligned_depth_to_color/image_raw'),
('rgb/image', '/camera/color/image_raw'),
('rgb/camera_info', '/camera/color/camera_info')]
It works perfectly. Thanks again for the first reply, but I do still wonder if it runs ICP or something of the sort behind the scenes?


