Hi,
I have a rosbag with stereo images (and camera_info), odometry, imu and tf data, I play it using rosbag play --clock. I have the problem of this issue (
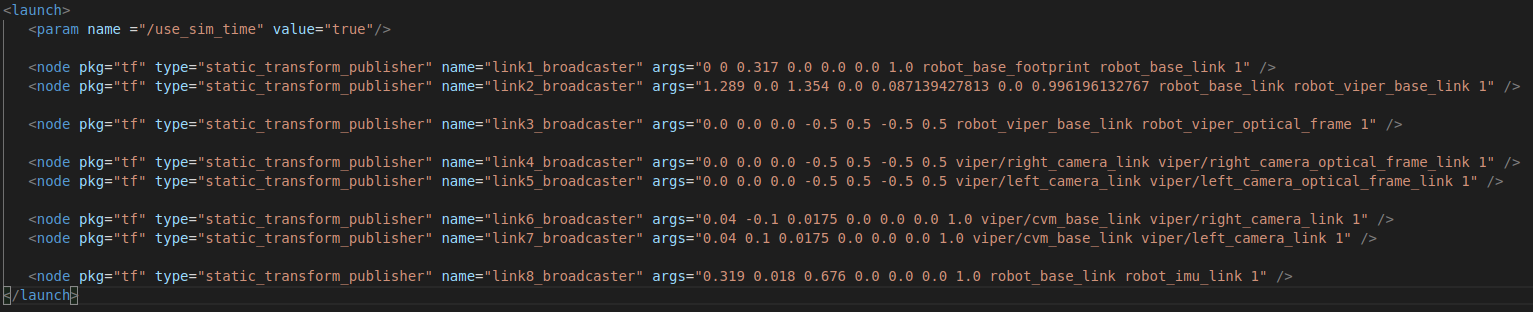
https://answers.ros.org/question/261187/bug-rosbag-filter-and-tf_static/ ) so I publish the static transforms with static_transform_publisher:
But always after "rtabmap 0.20.18 started..." the node is killed:
rtabmap died from signal 11
rtabmap left a core dump
Using gdb I get:
#0 0x00007fffe8c64bb1 in cv::Mat::copySize(cv::Mat const&) () at /usr/lib/x86_64-linux-gnu/libopencv_core.so.3.2
#1 0x00007fff713e1e7e in rtabmap::Transform::Transform(rtabmap::Transform const&) (this=0x7fff82feed30) at /opt/ros/melodic/lib/rtabmap-0.20/../../include/rtabmap-0.20/rtabmap/core/Transform.h:41
#2 0x00007fff713e1e7e in rtabmap::Rtabmap::getMapCorrection() const (this=0x555556afdff8) at /opt/ros/melodic/lib/rtabmap-0.20/../../include/rtabmap-0.20/rtabmap/core/Rtabmap.h:145
#3 0x00007fff713e1e7e in rtabmap_ros::CoreWrapper::process(ros::Time const&, rtabmap::SensorData&, rtabmap::Transform const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, cv::Mat const&, rtabmap::OdometryInfo const&, double) (this=this@entry=0x555556afc400, stamp=..., data=..., odom=..., odomFrameId="robot_odom", odomCovariance=..., odomInfo=..., timeMsgConversion=0.002887725830078125) at ./src/CoreWrapper.cpp:2139
...
And sometimes (not always) I get this warning before the core dump:
[ WARN] (2022-03-30 12:47:37.010) Transform.cpp:524::getTransform() No transform found for stamp 1648211994.991779! Earliest is 1648211995.029589
[ WARN] [1648637257.010914276, 1648211995.341295886]: We are receiving imu data (buffer=13), but cannot interpolate imu transform at time 1648211994.991779. IMU won't be added to graph.
Do you have any idea?
Thank you in advance,
Inés

