Hi,
the Grid parameters will affect cloud_map as well as the occupancy grid. The occupancy grid is actually created from the cloud_map.
How do I keep the occupancy map from lidar but have the cloudmap output be point cloud from the RGBD camera
it is not possible.
You would need to keep rtabmap node using the lidar. To get the 3D point cloud, you would need to add a map_assembler node subscribed to /rtabmap/mapData with "regenerate_local_grids" parameter set to true. By default Grid/FromDepth is true on that node. Example with demo_mapping.launch
roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false
rosbag play --clock demo_mapping.bag
rosrun rtabmap_ros map_assembler _regenerate_local_grids:=true mapData:=/rtabmap/mapData
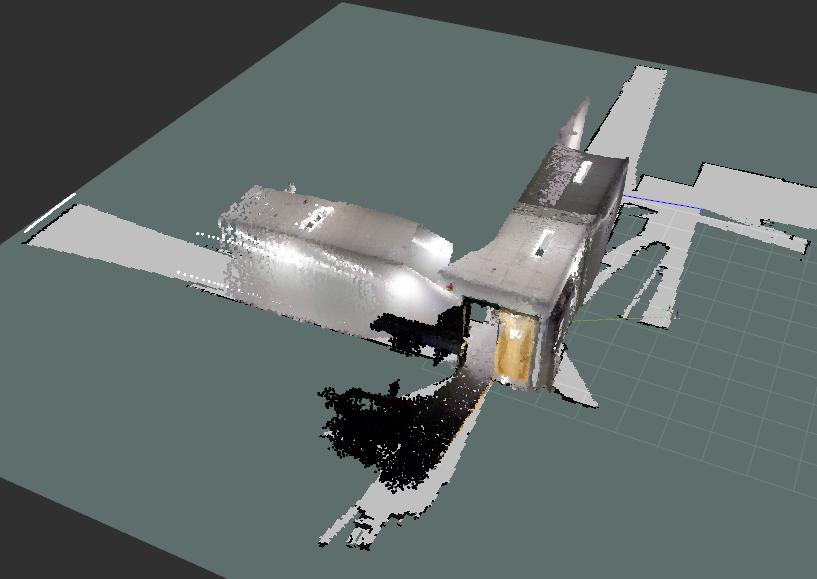
There would be a topic called /map_assembler/cloud_map. Here is that cloud from depth images with the occupancy grid created from scans: