Hello,
I'm currently performing SLAM-based mapping using only a RealSense D455 camera (no wheel odometry).
I followed the suggestion in this [comment](
https://github.com/introlab/rtabmap_ros/issues/1105#issuecomment-1902269943) to resolve the map overlapping issue, and it initially helped.
However, I'm now encountering a new problem:
After the robot completes one more loop, TF errors begin to appear.
Specifically, **all nodes except `map` and `odom`** start showing errors like:
No transform from [XXX] to [map]
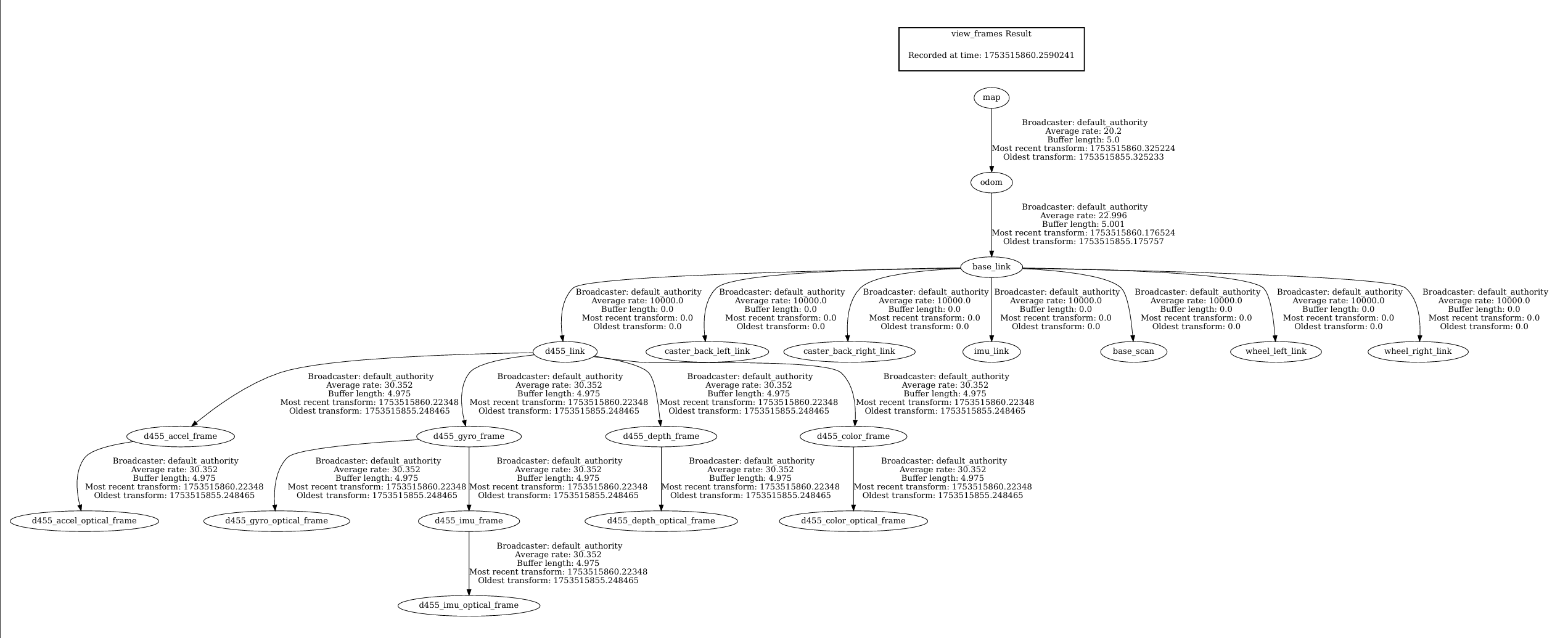
I've attached my current TF tree for reference.
Has anyone experienced this issue before, or does anyone have suggestions on how to fix it?
Thank you!