Hello, I’ve got some problems when I running R-tabmap in navigation
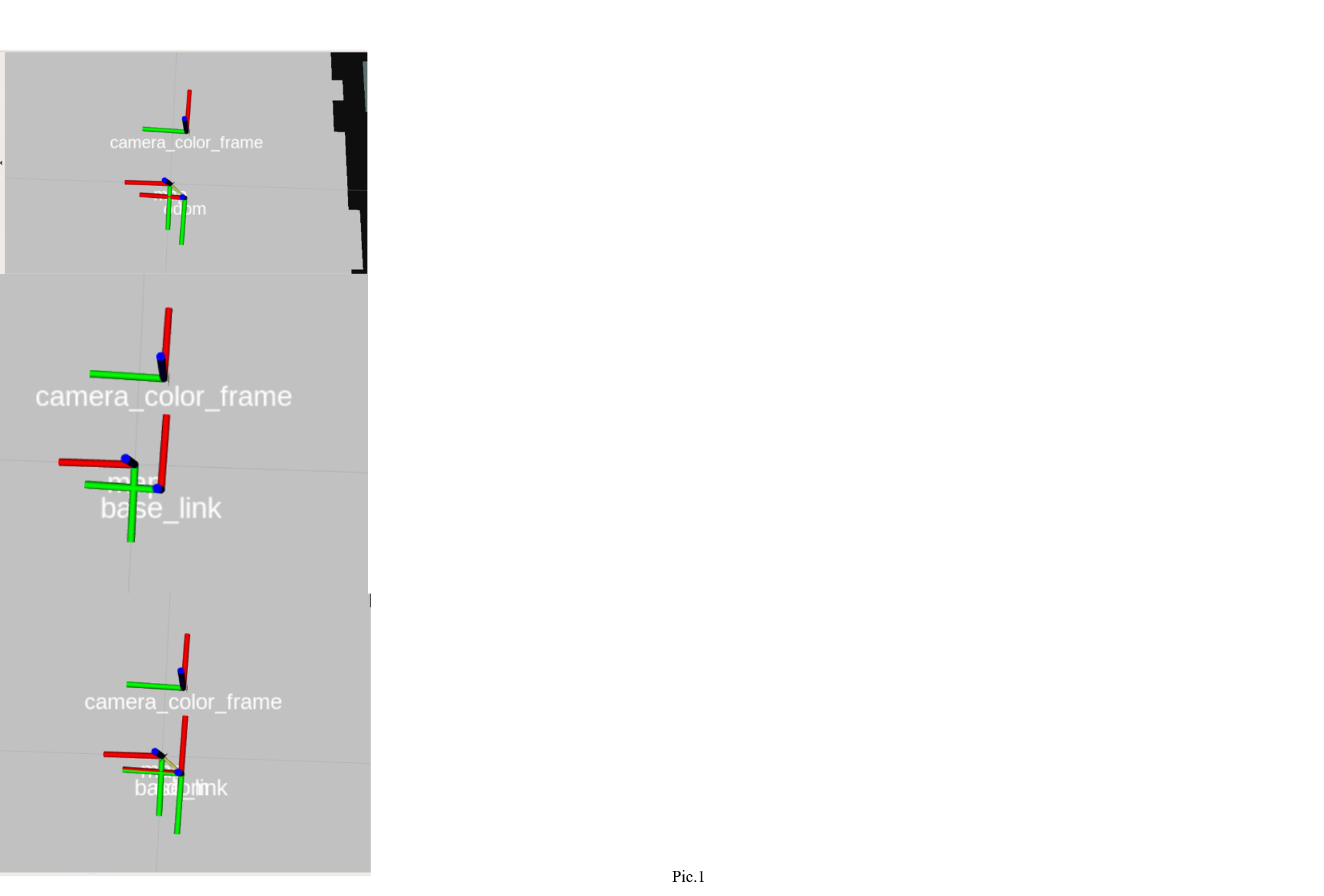
1. I found that TF is strange, map and odom was rotate 90 degree from base_link, that you can see in the pic.1.
Pic.1
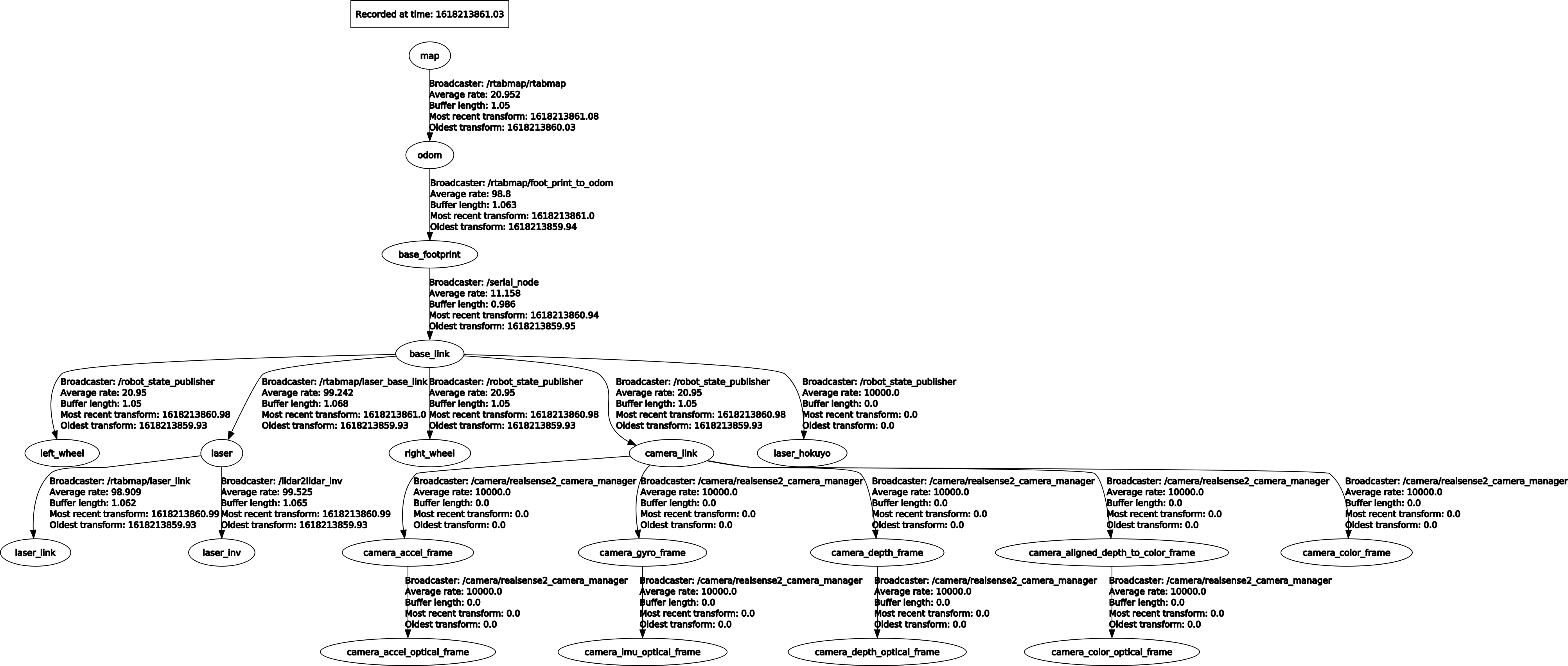
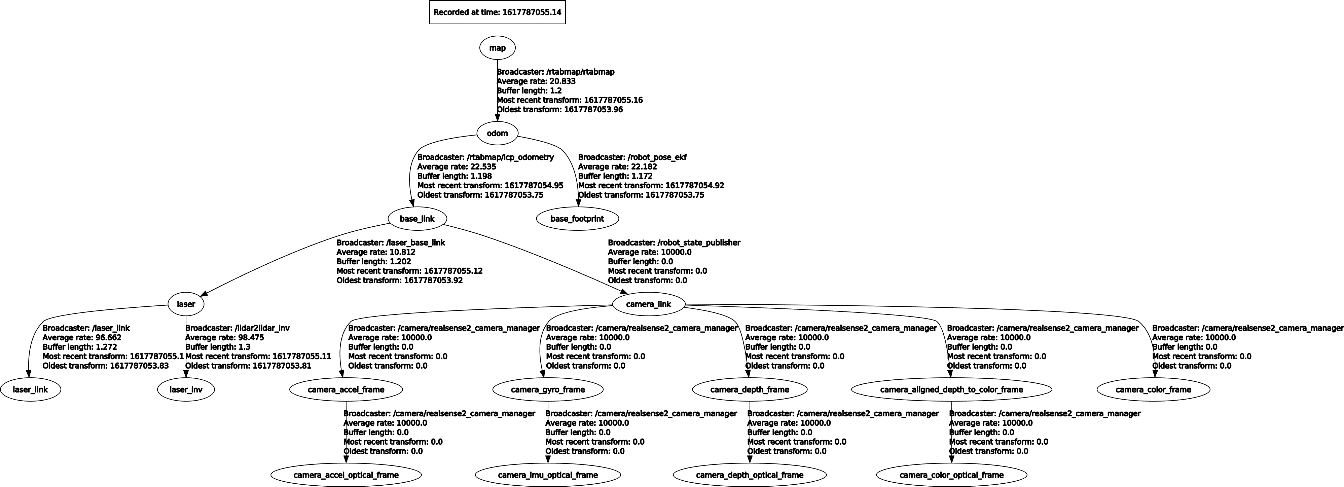
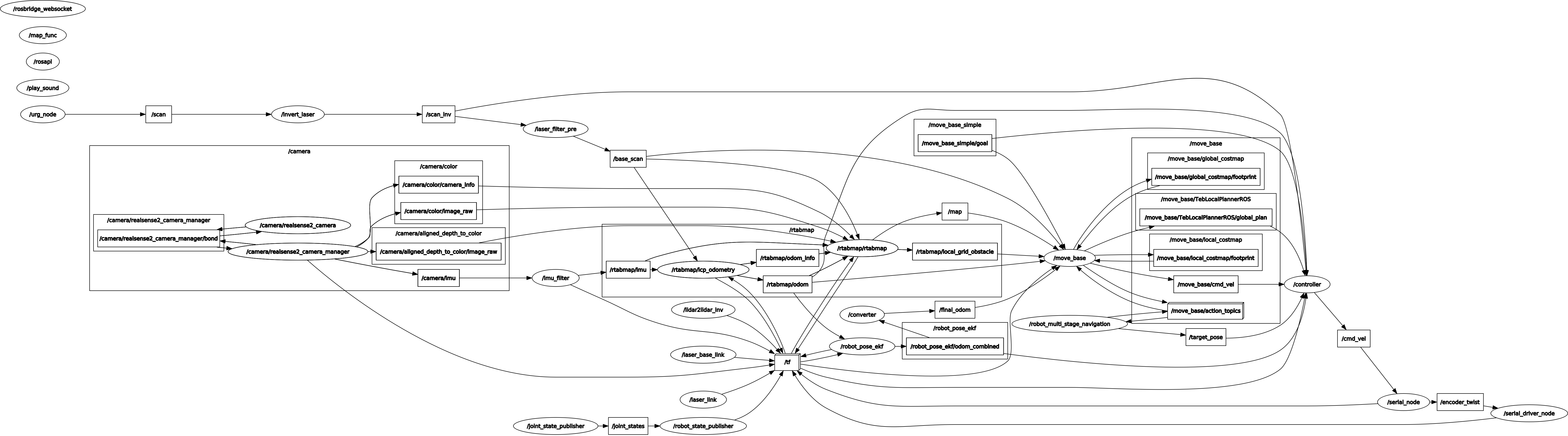
I checked my tf_tree,it seems work, and tf data were keep sending data.
2. I used the Hokuyo lidar and D435i depth camera to do odometry, and I had odom data can send by serial_node, but I can’t understand that how the setting of toturials.
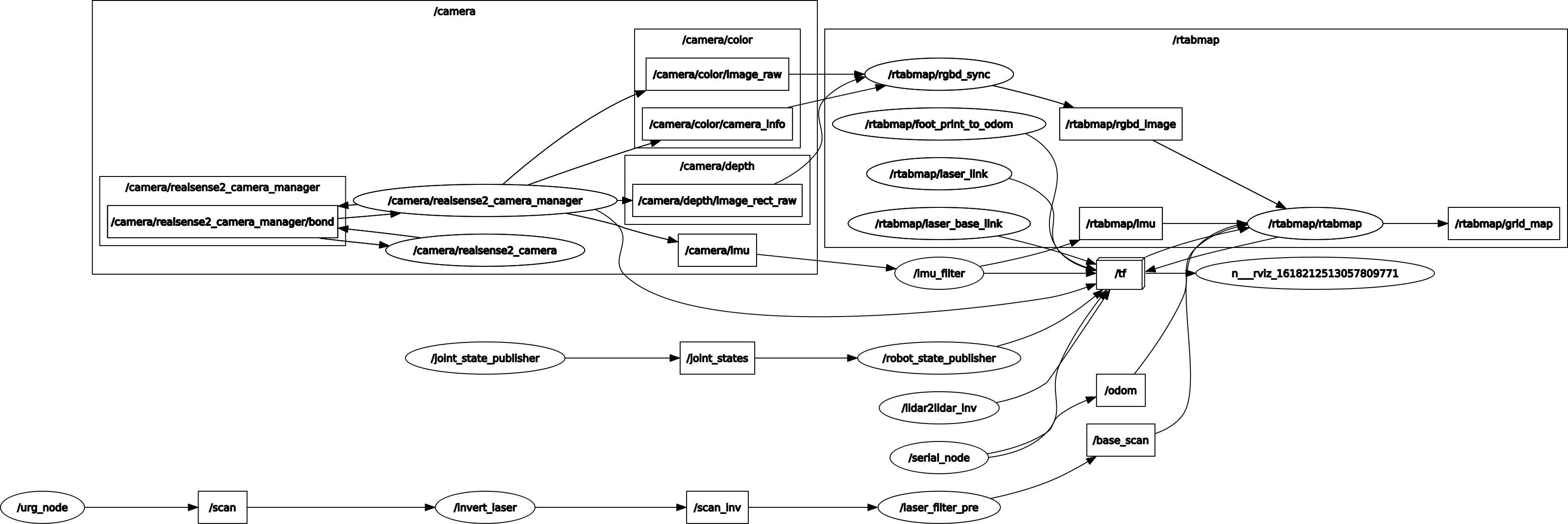
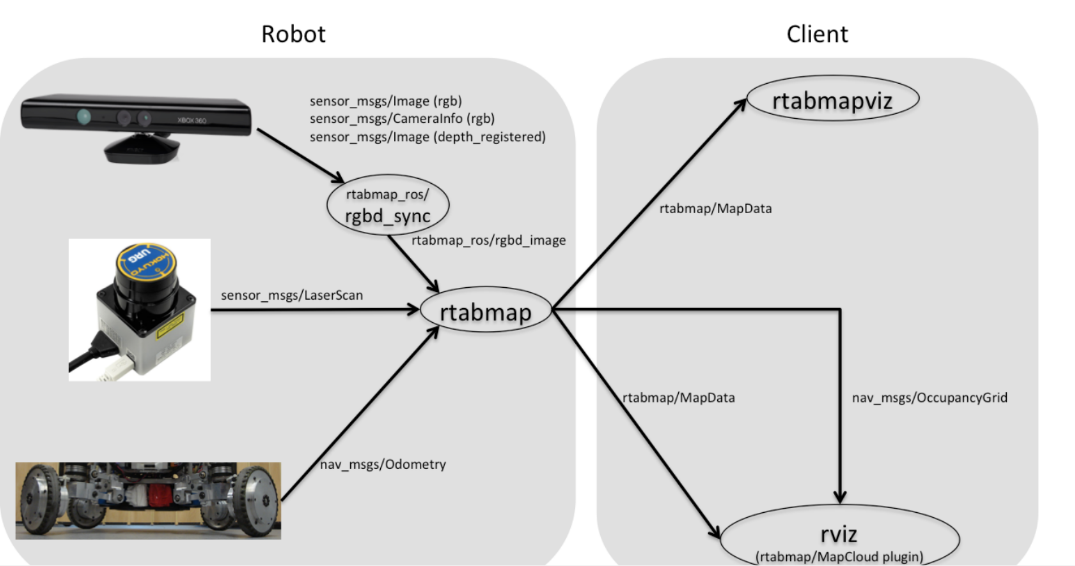
I try to let all data combine like pic.2, but it get wrong TF in pic.3.
pic.2
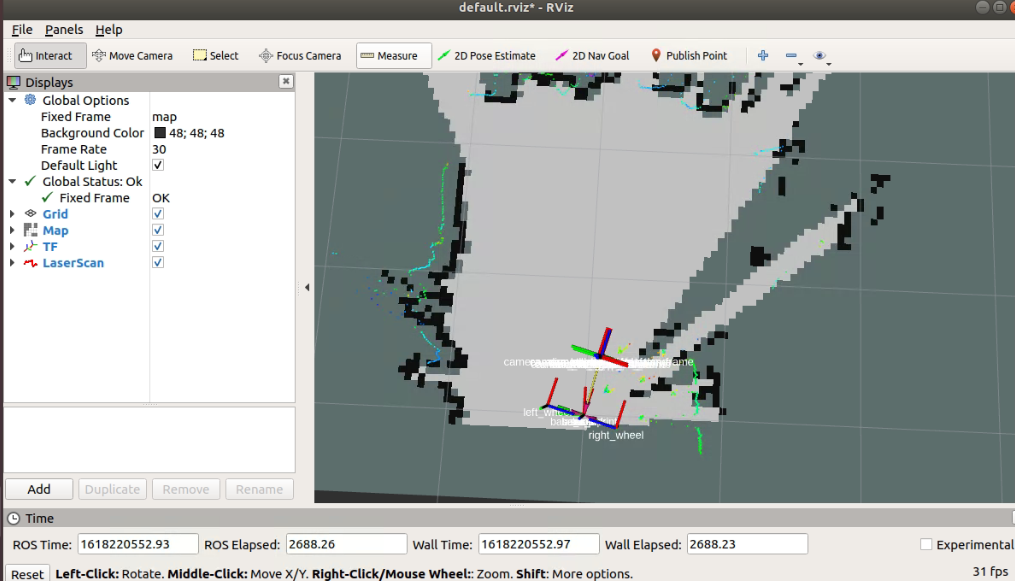
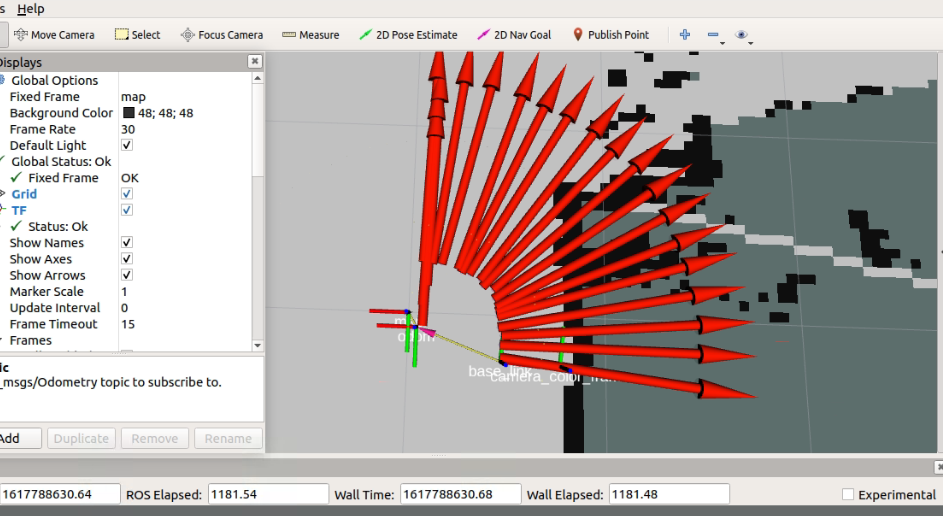
pic.3
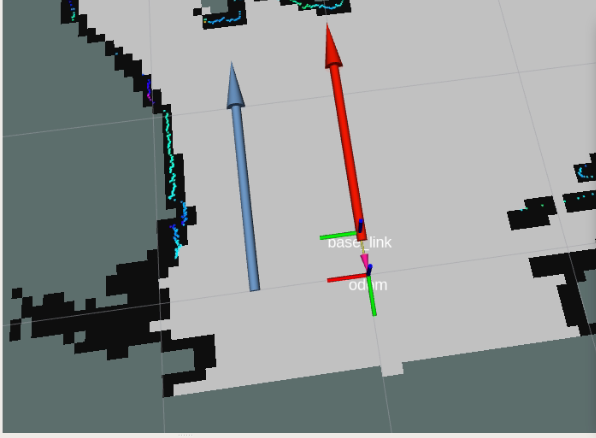
Blue arrow is nav_msg/odometry, and red one is icp_odometry data, they are in the different TF.
3. When I run in navigation mode, my robot moved very strange, when base_link moved, odom wasn’t moving. Also, when base_link turn around in one point, it moved in strange way in pic.4, it turned in a strange radius that the center of circle is not base_link.
pic.4
This is my rtabmap.launch code, is there anything wrong?
rtabmap.launchI’m sorry for my poor English, these problems had bothered me for a long time, so I come here to ask my questions, please someone help me.