Hi,
rtabmap.tmp.db is a temporary database, normally you should not use it directly. If rtabmap crashes during the scan, there is a tool called rtabmap-recovery.exe in the bin folder of RTAB-Map, in a command window:
rtabmap-recovery.exe rtabmap.tmp.db
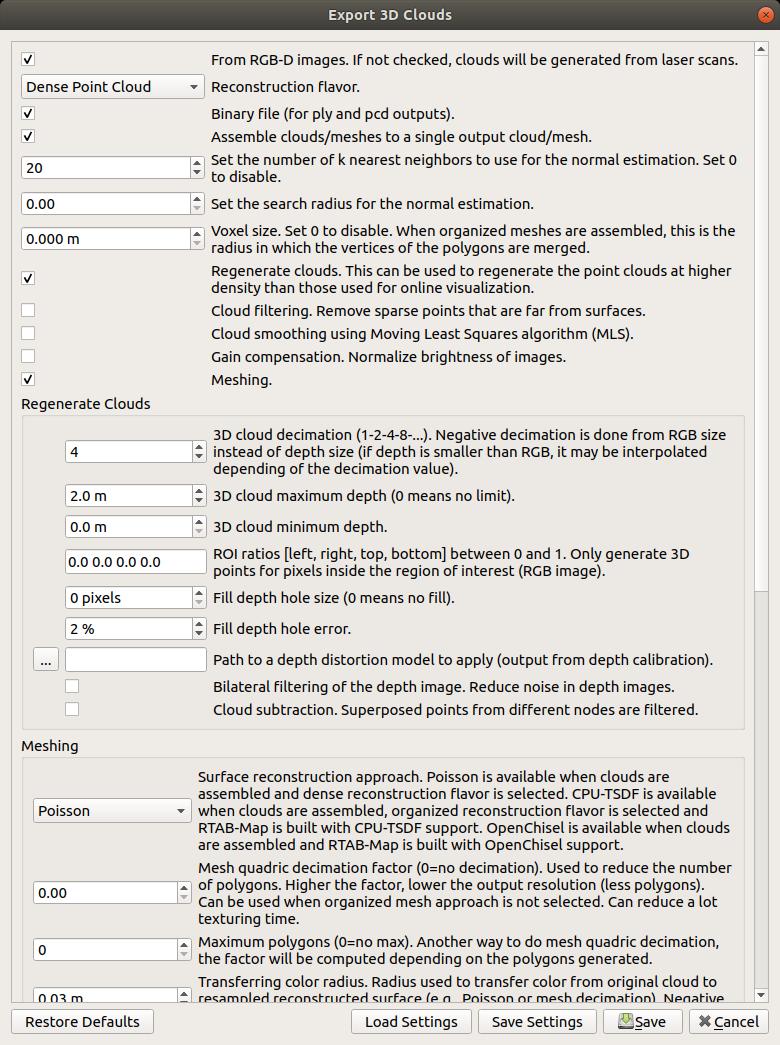
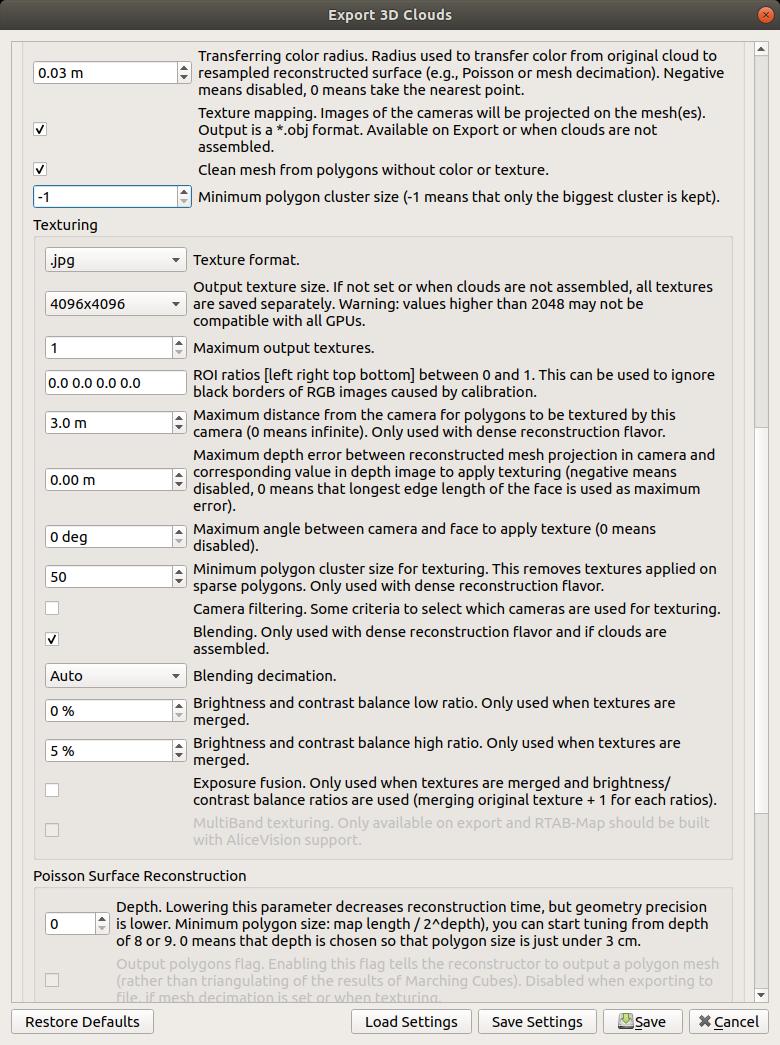
If you open that new database in RTAB-Map.exe, you should see the whole map correctly loaded. In File->Export 3D Clouds, set those parameters:
When correctly exported:
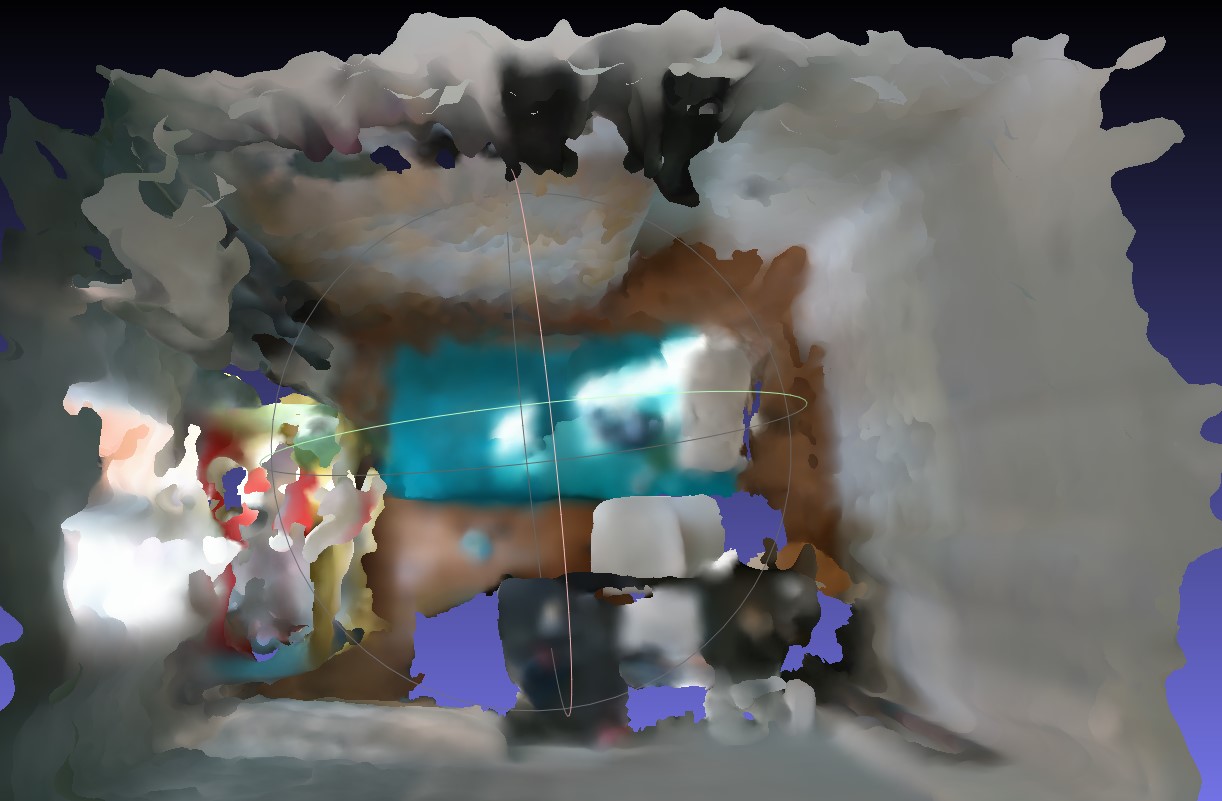
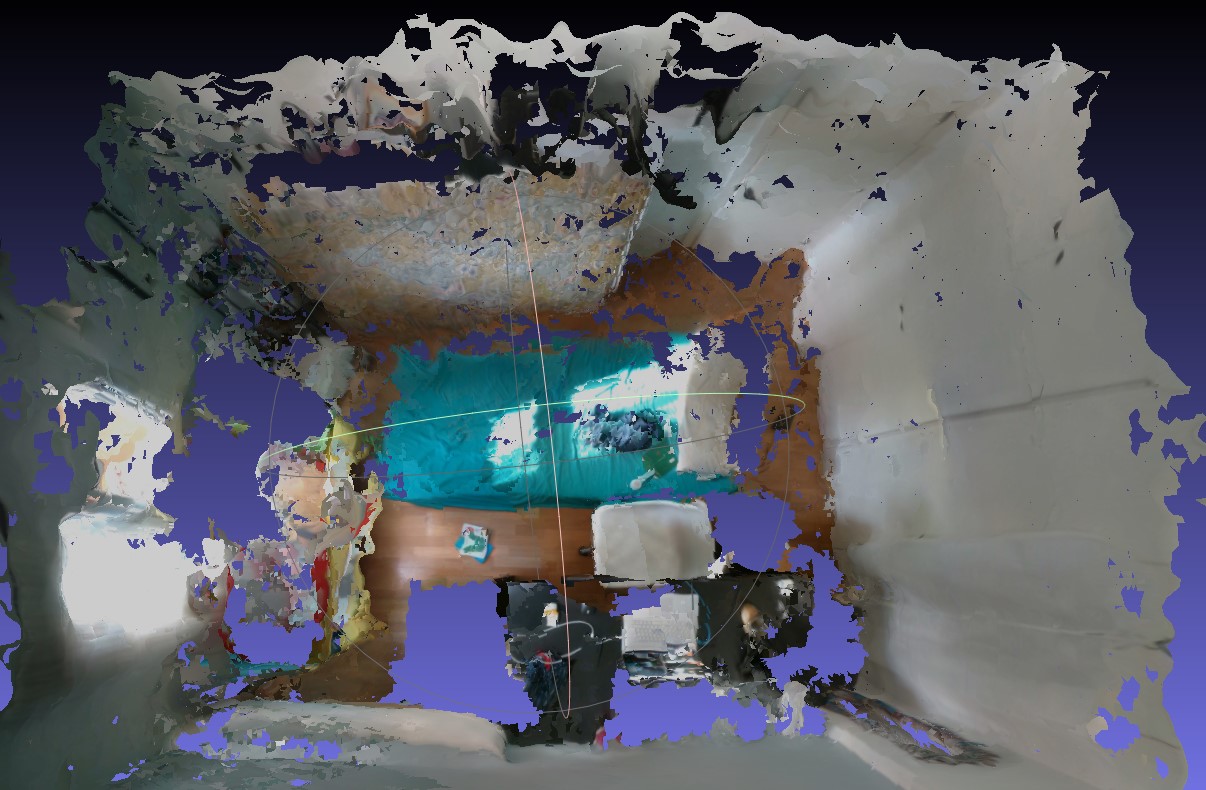
Note that the screenshots above are from linux, but I did try with 0.20.3 Windows version and it should work (the whole system RAM usage didn't get over 6GB). The results on Windows: on left the PLY (when texture mapping is off) and on he right the OBJ (when texture mapping is on), then opened in Meshlab (shading off, backface culling on):
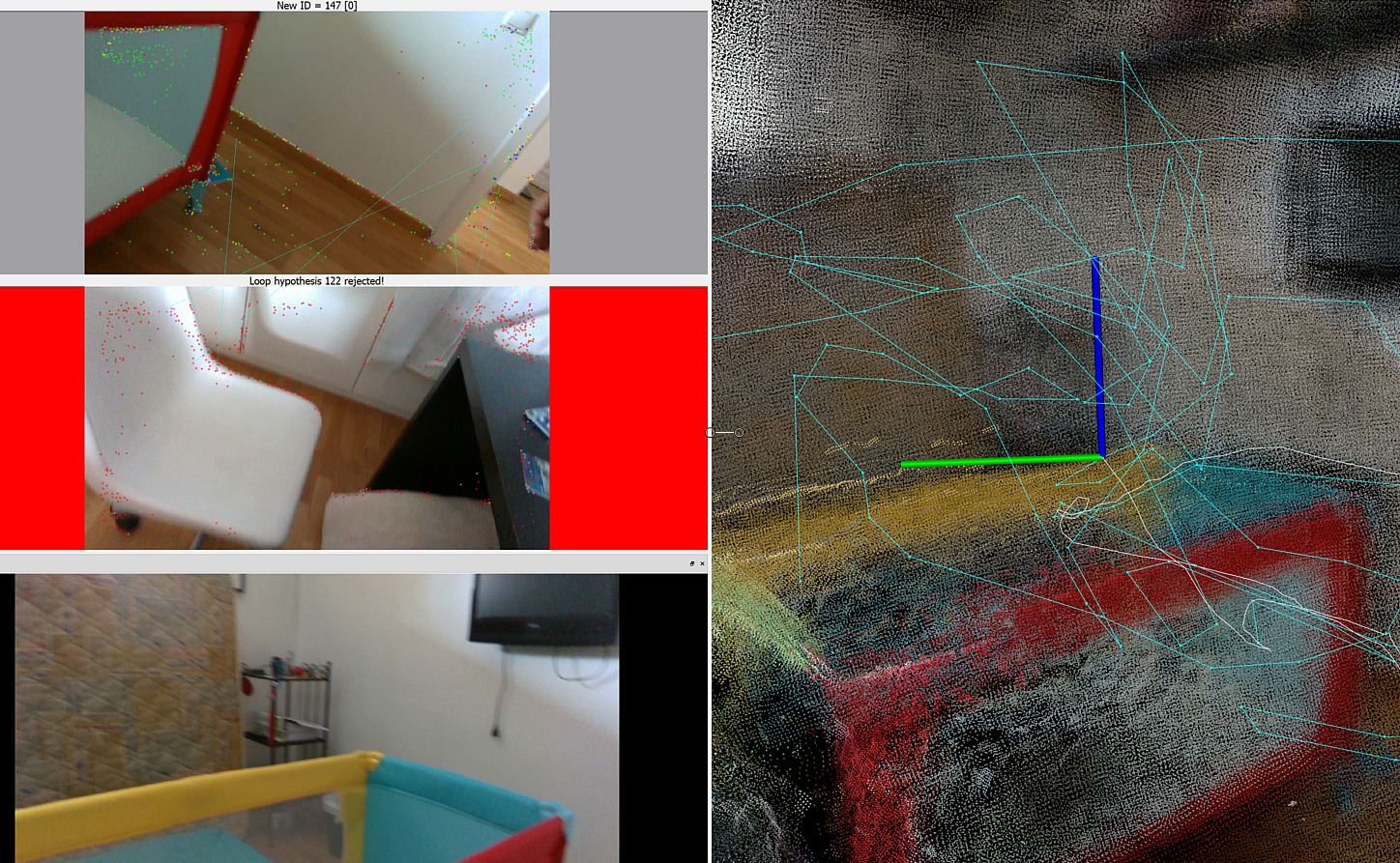
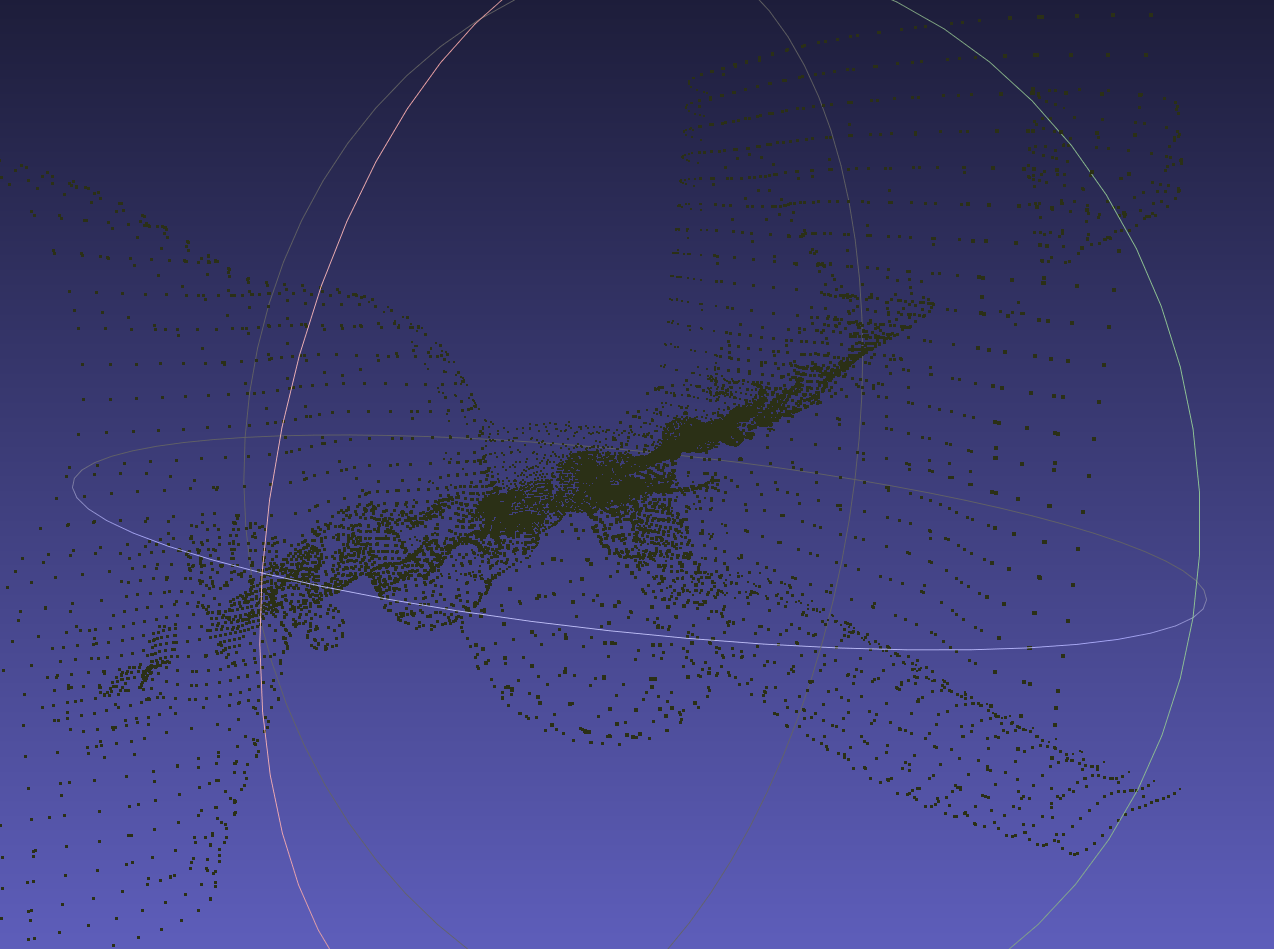
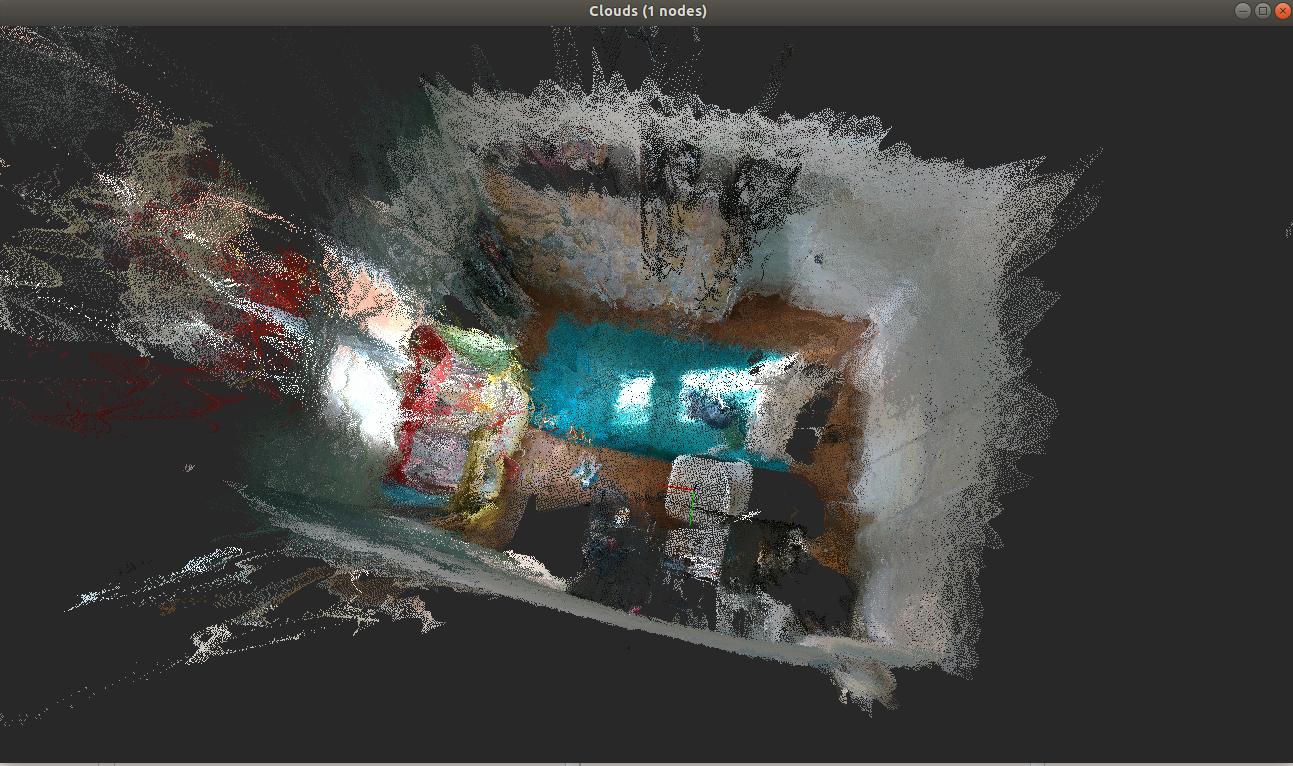
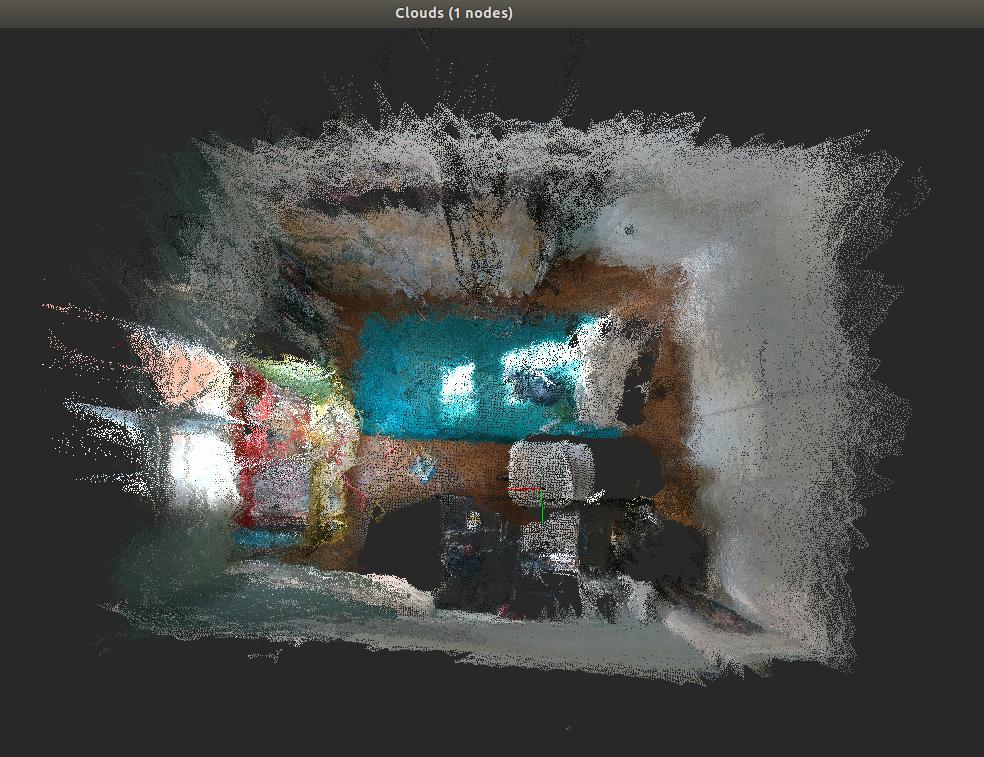
Note that you can do Edit->View Clouds to just look at the result before exporting (it can be faster to check the effect of some parameters). Here is a preliminary example when I tuned the max range parameter to filter the points outside the room (because of the window):
As you are using the T265 for odometry, you can check "Use odometry instead of IMU orientation to add gravity links to new nodes created." in Preferences->RGB-D SLAM panel with "Gravity sigma value"=0.3 in Graph Optimization panel. We cannot see as much difference in this map, but for larger maps the optimization will include gravity constraints to make sure the floor is always straight.
cheers,
Mathieu