Stereo 3D-mapping jump


|
This post was updated on .
Hi,
I used installed a stereo camera to a simulated husky robot and do the stereo-3D mapping. However, everytime when I start the mapping, the 2D map will always jump to a different location. 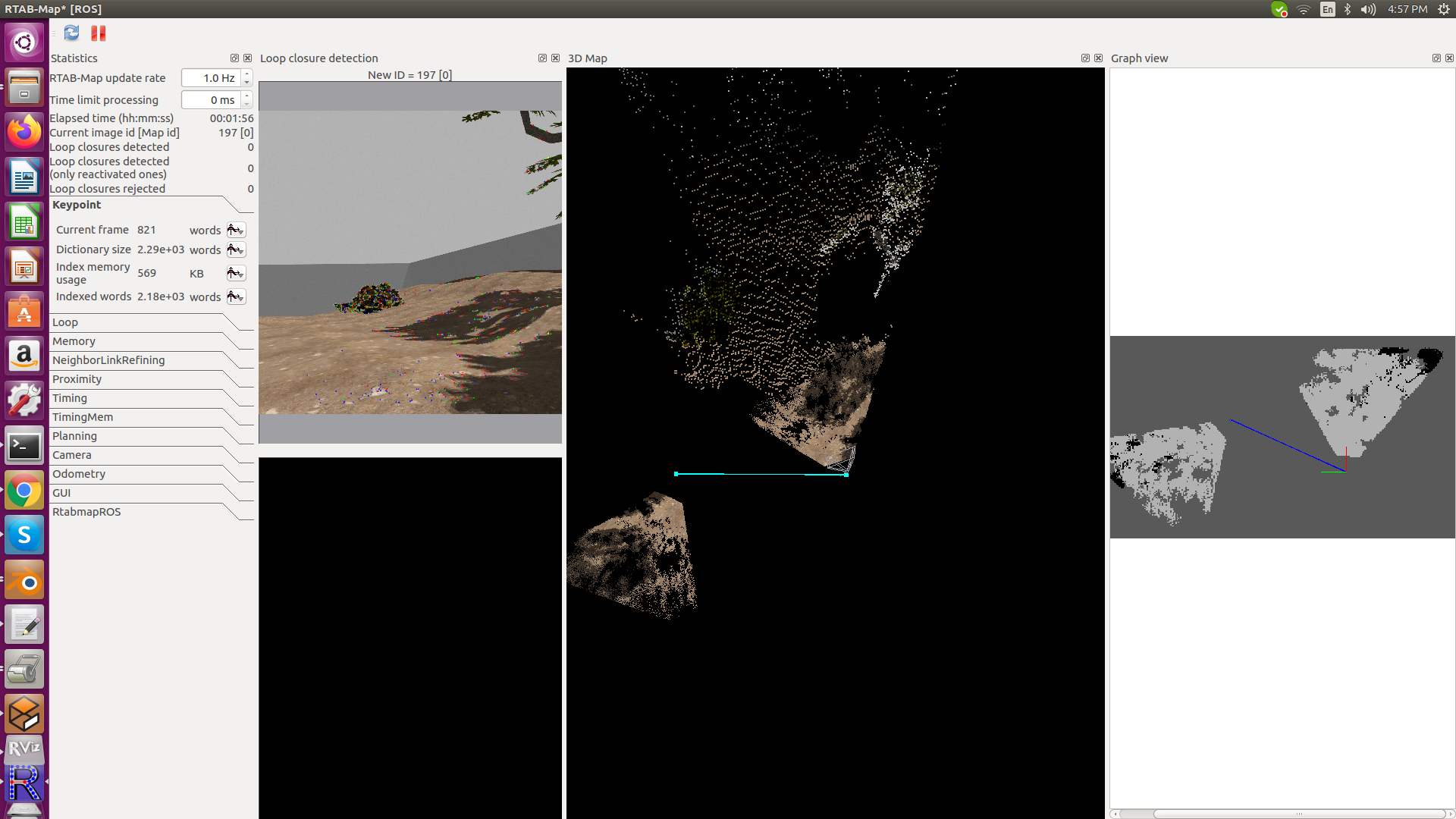
<launch>
<node pkg="nodelet" type="nodelet" name="stereo_nodelet" args="manager"/>
<node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc">
<param name="disparity_range" value="128"/>
<remap from="left/image_raw" to="/multisense_sl/camera/left/image_raw"/>
<remap from="left/camera_info" to="/multisense_sl/camera/left/camera_info"/>
<remap from="right/image_raw" to="/multisense_sl/camera/right/image_raw"/>
<remap from="right/camera_info" to="/multisense_sl/camera/right/camera_info"/>
<param name="disparity_range" value="128"/>
</node>
<node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen">
<remap from="left/image_rect" to="/left/image_rect"/>
<remap from="right/image_rect" to="/right/image_rect"/>
<remap from="left/camera_info" to="/multisense_sl/camera/left/camera_info"/>
<remap from="right/camera_info" to="/multisense_sl/camera/right/camera_info"/>
<remap from="odom" to="/stereo_odometry"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="odom_frame_id" type="string" value="/odom"/>
<param name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="Rtabmap/LoopThr" type="string" value="1000"/>
<param name="Odom/Strategy" type="string" value="0"/> <!-- 0=BOW, 1=OpticalFlow -->
<param name="Odom/EstimationType" type="string" value="1"/> <!-- 3D->2D (PnP) -->
<param name="Odom/MinInliers" type="string" value="15"/>
<param name="Odom/RoiRatios" type="string" value="0.03 0.03 0.04 0.04"/>
<param name="Odom/FilteringStrategy" type="string" value="2"/>
<param name="OdomBow/NNDR" type="string" value="0.8"/>
<param name="Odom/MaxFeatures" type="string" value="1000"/>
<param name="OdomF2M/BundleAdjustmentMaxFrames" type="string" value="0"/>
<param name="GFTT/MinDistance" type="string" value="10"/>
<param name="GFTT/QualityLevel" type="string" value="0.00001"/>
</node>
<!-- Backward compatibility launch file, use "rtabmap.launch rgbd:=false stereo:=true" instead -->
<!-- Your camera should be calibrated and publishing rectified left and right
images + corresponding camera_info msgs. You can use stereo_image_proc for image rectification.
Example:
$ roslaunch rtabmap_ros bumblebee.launch -->
<!-- Choose visualization -->
<arg name="rtabmapviz" default="true" />
<arg name="rviz" default="false" />
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<!-- Corresponding config files -->
<arg name="rtabmapviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="base_footprint"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published -->
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="rtabmap_args" default="--delete_db_on_start"/> <!-- delete_db_on_start, udebug -->
<arg name="launch_prefix" default=""/>
<arg name="approx_sync" default="false"/> <!-- if timestamps of the input topics are not synchronized -->
<arg name="stereo_namespace" default="/stereo_camera"/>
<arg name="left_image_topic" default="/left/image_rect_color" />
<arg name="right_image_topic" default="/right/image_rect" /> <!-- using grayscale image for efficiency -->
<arg name="left_camera_info_topic" default="/multisense_sl/camera/left/camera_info" />
<arg name="right_camera_info_topic" default="/multisense_sl/camera/right/camera_info" />
<arg name="compressed" default="false"/>
<arg name="subscribe_scan" default="false"/> <!-- Assuming 2D scan if set, rtabmap will do 3DoF mapping instead of 6DoF -->
<arg name="scan_topic" default="/scan"/>
<arg name="subscribe_scan_cloud" default="false"/> <!-- Assuming 3D scan if set -->
<arg name="scan_cloud_topic" default="/scan_cloud"/>
<arg name="visual_odometry" default="false"/> <!-- Generate visual odometry -->
<arg name="odom_topic" default="/stereo_odometry"/> <!-- Odometry topic used if visual_odometry is false -->
<arg name="odom_frame_id" default=""/> <!-- If set, TF is used to get odometry instead of the topic -->
<arg name="namespace" default="rtabmap"/>
<arg name="wait_for_transform" default="0.2"/>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="stereo" value="true"/>
<arg name="rtabmapviz" value="$(arg rtabmapviz)" />
<arg name="rviz" value="$(arg rviz)" />
<arg name="localization" value="$(arg localization)"/>
<arg name="gui_cfg" value="$(arg rtabmapviz_cfg)" />
<arg name="rviz_cfg" value="$(arg rviz_cfg)" />
<arg name="frame_id" value="$(arg frame_id)"/>
<arg name="namespace" value="$(arg namespace)"/>
<arg name="database_path" value="$(arg database_path)"/>
<arg name="wait_for_transform" value="$(arg wait_for_transform)"/>
<arg name="rtabmap_args" value="$(arg rtabmap_args)"/>
<arg name="launch_prefix" value="$(arg launch_prefix)"/>
<arg name="approx_sync" value="$(arg approx_sync)"/>
<arg name="stereo_namespace" value="$(arg stereo_namespace)"/>
<arg name="left_image_topic" value="$(arg left_image_topic)" />
<arg name="right_image_topic" value="$(arg right_image_topic)" />
<arg name="left_camera_info_topic" value="$(arg left_camera_info_topic)" />
<arg name="right_camera_info_topic" value="$(arg right_camera_info_topic)" />
<arg name="compressed" value="$(arg compressed)"/>
<arg name="subscribe_scan" value="$(arg subscribe_scan)"/>
<arg name="scan_topic" value="$(arg scan_topic)"/>
<arg name="subscribe_scan_cloud" value="$(arg subscribe_scan_cloud)"/>
<arg name="scan_cloud_topic" value="$(arg scan_cloud_topic)"/>
<arg name="visual_odometry" value="$(arg visual_odometry)"/>
<arg name="odom_topic" value="$(arg odom_topic)"/>
<arg name="odom_frame_id" value="$(arg odom_frame_id)"/>
<arg name="odom_args" value="$(arg rtabmap_args)"/>
</include>
</launch>
Attached is localization code. Could you please help me figure out why it jumps all the time?
|
|
Administrator
|
Can you record the TF tree? maybe you have another node publishing odom or map frames.
rosrun tf view_frames |
|
|
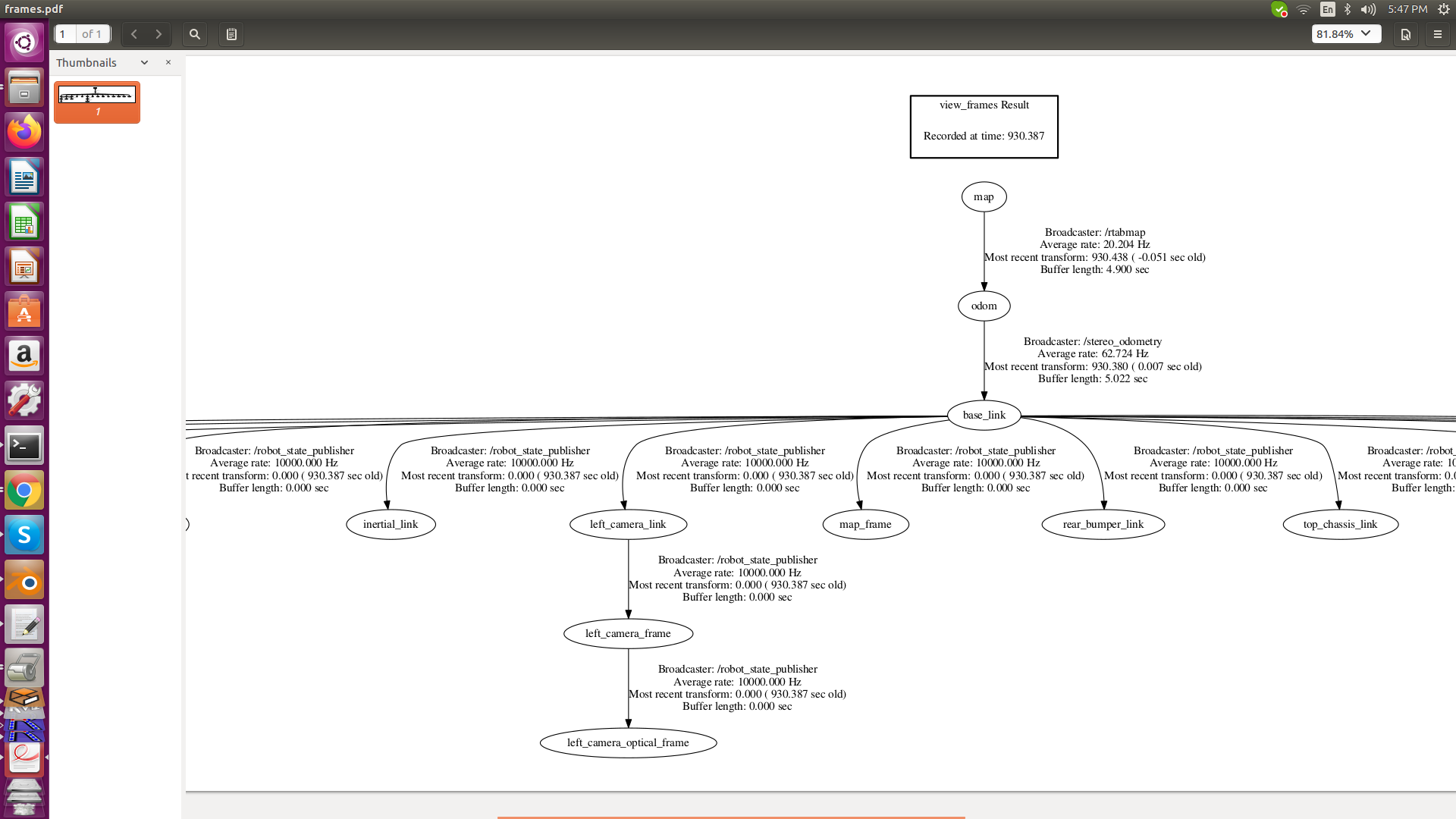 Hi Attached is the TF from the above code |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |