Stereo Navigation and Mapping


|
Hey there,
First of all, I want to thank Mathieu Labbé for this great system. I am trying to use rtabmap for navigation and mapping with pioneer3at combined with a stereo-camera system (bumblebee2). The mapping is working great and now I try to go for the next step and have also the navigation part included, but with no prior knowledge about the environment. Actually, what I try is SLAM + Navigation. To start of, it would be enough to send navGoals2D via the RVIZ UI and the robot make its way to the goal. I followed the az3_mapping_robot_stereo_nav.launch as provided by the corresponding ROS wiki page, but for some reasons I get the following error every 5 seconds: "[ WARN] [1441225422.168764378]: Waiting on transform from base_footprint to map to become available before running costmap, tf error: . canTransform returned after 0.100647 timeout was 0.1.. canTransform returned after 0.100674 ..." Has anyone encountered a similar behavior? I start the bumblee-driver on the robot, as well as rosaria to communicate with the platform. The rest is started on remote-oc, including roscore. What parts am I missing to fulfill the task? Thank you so much. I appreciate any help. I attached the rqt_graph. It seems that the planner and rosaria just float around... Here is my launch-file: <launch> <arg name="rviz" default="true" /> <arg name="pi/2" value="1.5707963267948966" /> <arg name="optical_rotate" value="-$(arg pi/2) 0 -$(arg pi/2)" /> <arg name="optical_translate" value="-0.10 0 0.72" /> <group ns="planner"> <remap from="openni_points" to="/planner_cloud"/> <remap from="base_scan" to="/base_scan"/> <remap from="map" to="/map"/> <remap from="move_base_simple/goal" to="/planner_goal"/> <node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen"> <rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/costmap_common_params.yaml" command="load" ns="global_costmap" /> <rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/costmap_common_params.yaml" command="load" ns="local_costmap" /> <rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/local_costmap_params_3d.yaml" command="load" /> <rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/global_costmap_params.yaml" command="load" /> <rosparam file="$(find rtabmap_ros)/launch/pioneer3/config/base_local_planner_params.yaml" command="load" /> </node> </group> <node pkg="tf" type="static_transform_publisher" name="camera_base_link" args="$(arg optical_translate) $(arg optical_rotate) base_link stereo_camera 100" /> <group ns="/stereo_camera" > <node pkg="nodelet" type="nodelet" name="stereo_throttle" args="standalone rtabmap_ros/stereo_throttle"> <remap from="left/image" to="left/image_raw"/> <remap from="right/image" to="right/image_raw"/> <remap from="left/camera_info" to="left/camera_info"/> <remap from="right/camera_info" to="right/camera_info"/> </node> <node pkg="stereo_image_proc" type="stereo_image_proc" name="stereo_image_proc"> <remap from="left/image_raw" to="left/image_raw_throttle"/> <remap from="left/camera_info" to="left/camera_info_throttle"/> <remap from="right/image_raw" to="right/image_raw_throttle"/> <remap from="right/camera_info" to="right/camera_info_throttle"/> </node> <node pkg="nodelet" type="nodelet" name="disparity2cloud" args="load rtabmap_ros/point_cloud_xyz stereo_nodelet"> <remap from="disparity/image" to="disparity"/> <remap from="disparity/camera_info" to="right/camera_info_throttle"/> <remap from="cloud" to="cloudXYZ"/> </node> <node pkg="nodelet" type="nodelet" name="obstacles_detection" args="load rtabmap_ros/obstacles_detection stereo_nodelet"> <remap from="cloud" to="cloudXYZ"/> <remap from="obstacles" to="/planner_cloud"/> </node> <node pkg="rtabmap_ros" type="stereo_odometry" name="stereo_odometry" output="screen"> <remap from="left/image_rect" to="left/image_rect"/> <remap from="right/image_rect" to="right/image_rect"/> <remap from="left/camera_info" to="left/camera_info"/> <remap from="right/camera_info" to="right/camera_info"/> </node> </group> <group ns="rtabmap"> <node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start"> <remap from="left/image_rect" to="/stereo_camera/left/image_rect_color"/> <remap from="right/image_rect" to="/stereo_camera/right/image_rect"/> <remap from="left/camera_info" to="/stereo_camera/left/camera_info"/> <remap from="right/camera_info" to="/stereo_camera/right/camera_info"/> <remap from="odom" to="/stereo_camera/odom"/> </node> <node pkg="rtabmap_ros" type="map_assembler" name="map_assembler"> <remap from="mapData" to="mapData_optimized"/> <remap from="grid_projection_map" to="/map"/> </node> </group> <node if="$(arg rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_ros)/launch/config/jtl_stereo.rviz"/> </launch> 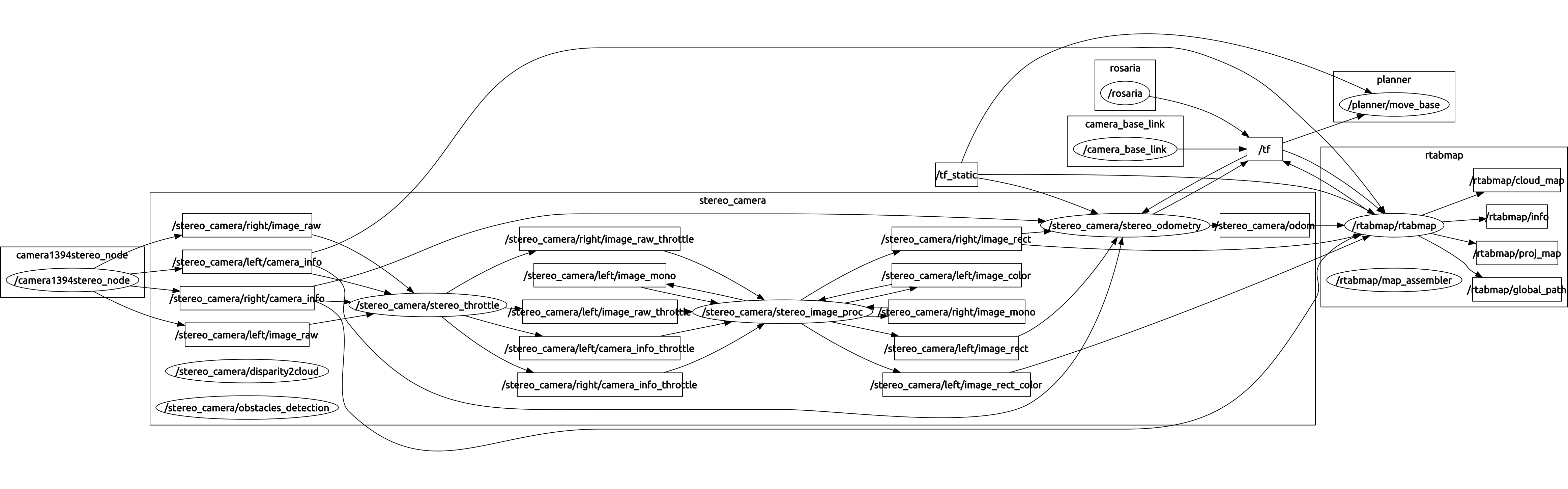 |
|
Administrator
|
Hi,
1. Is base_footprint transform published on TF? What is your TF tree? Well, all rtabmap nodes have not "frame_id" redefined, which is "base_link" by default. If you have only base_link published, you may change the "base_footprint" frame in the yaml files to "base_link". 2. "stereo_nodelet" is not created (at least in the launch file provided), so move_base will not receive the "/planner_cloud" for the local costmap. 3. The map_assembler node is not connected in the graph (looks like map_optimizer missing). In current rtabmap_ros version, you don't need map_optimizer or map_assembled. You can connect directly the "rtabmap/proj_map" to "/map" used by move_base so the global costmap can be created. To have the point cloud, rtabmap node publishes "rtabmap/cloud_map" for convenience. See the doc for corresponding parameters.
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<remap from="proj_map" to="/map"/>
...
cheers |
|
|
Thank you so much.
I highly appreciate your help and I cannot tell how great your support is you offer. Now, the system is running without errors or warnings. The Graph looks as follows: 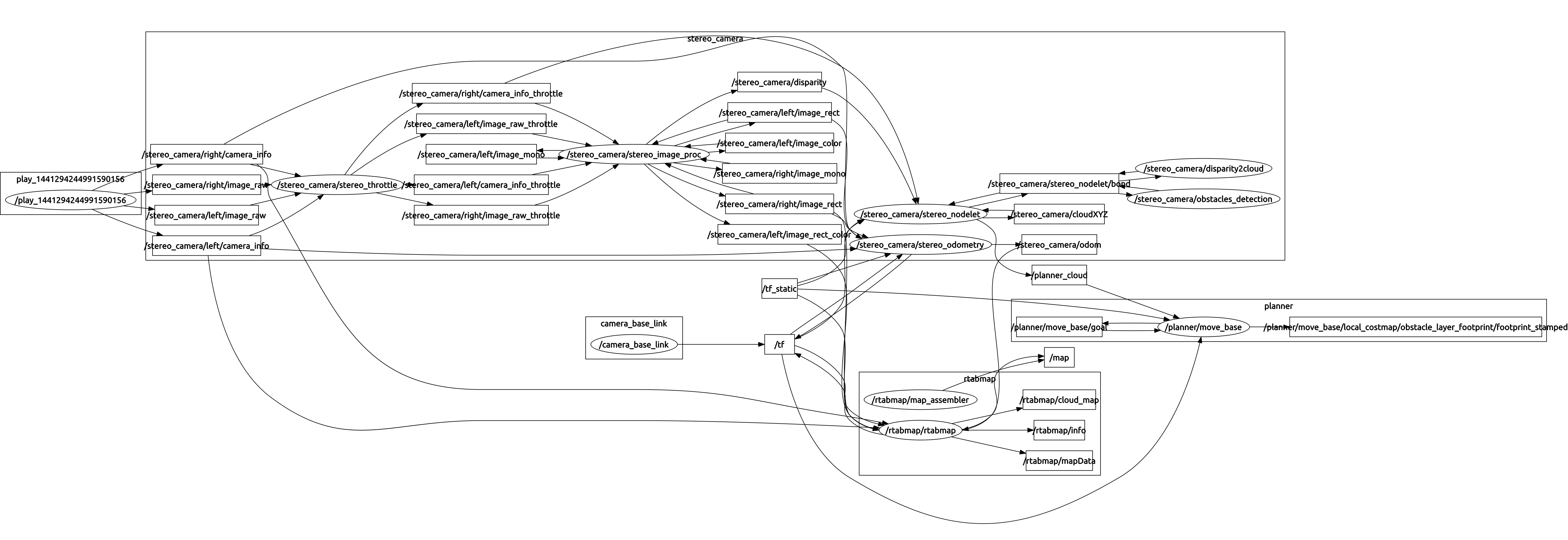 For the sake of sharing I provide here my "final" launch file:
|
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |