
This is a ros bag recorded.
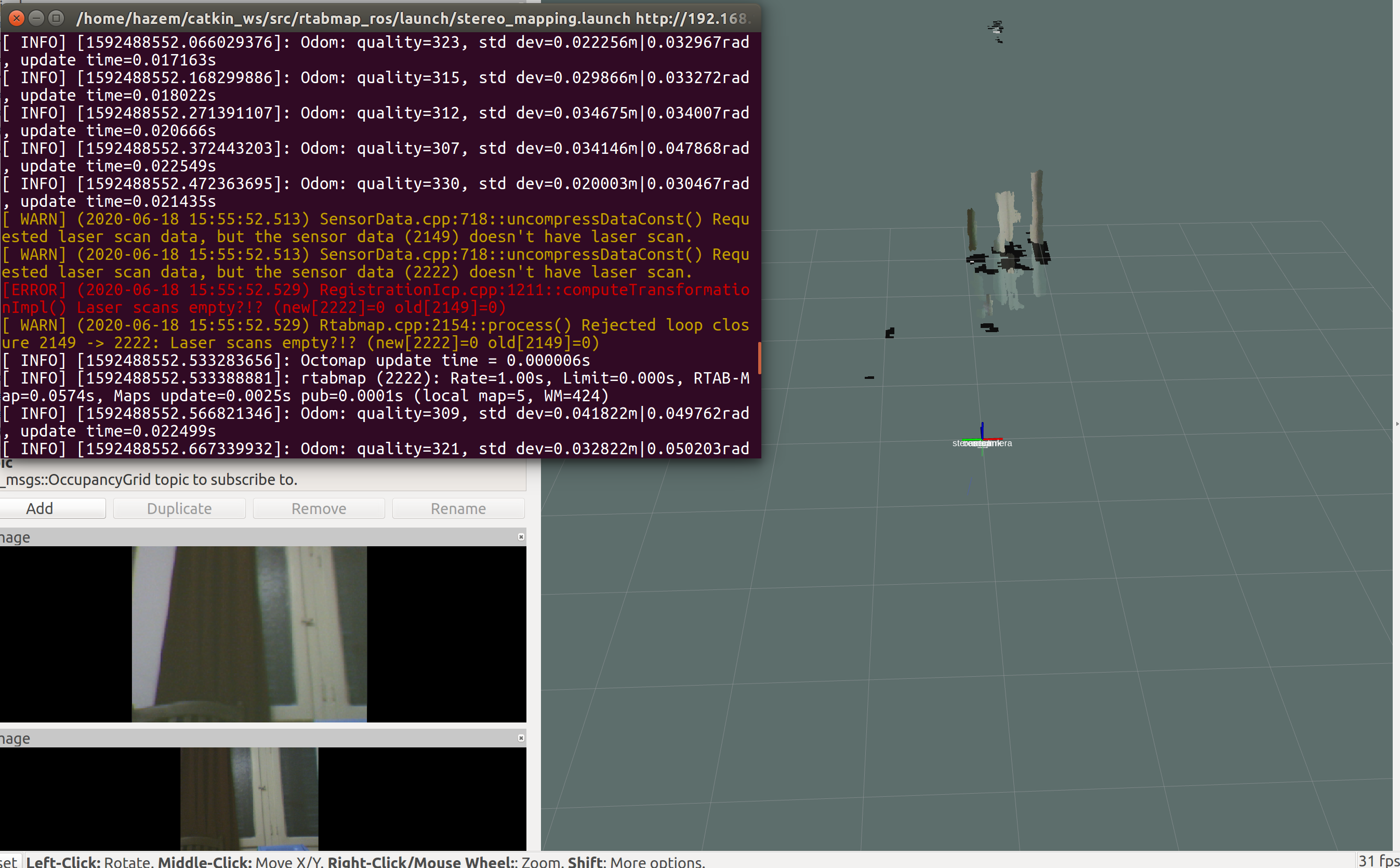
I am using two web cams as stereo camera, I calibrated them and but when I run the rtab-map the point cloud is as shown so what can I do?
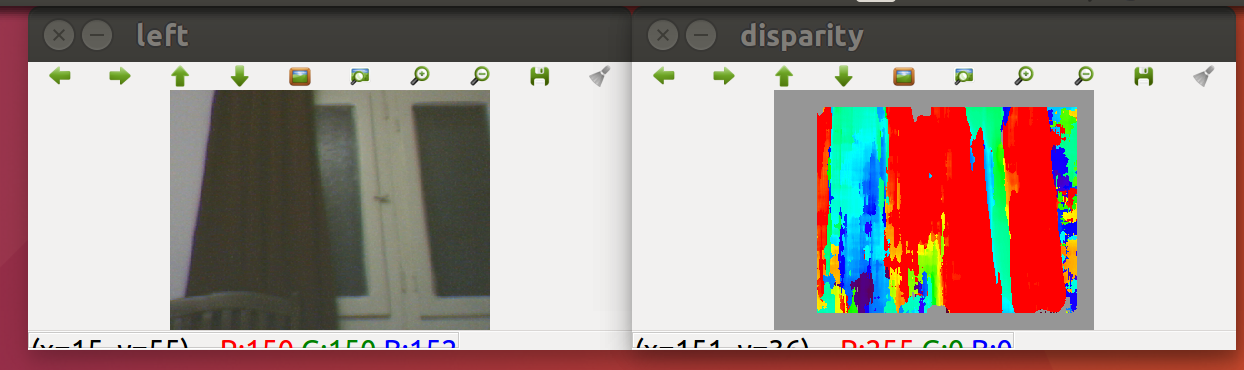
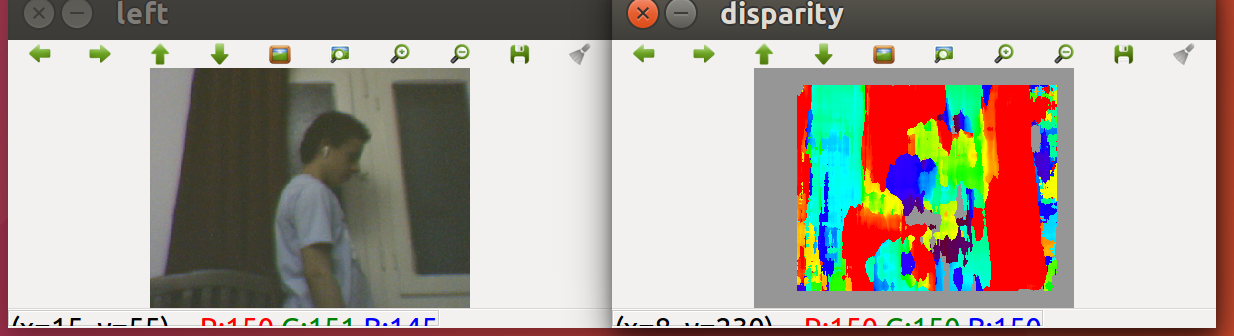
These are my disparity images, I tries to adjust the parameters but I couldn't do more than that

