Hi,
I'm working with a stereo pair existing of 2 FLIR Blackfly camera's which are calibrated and rectified in the stereo_image_proc node. I feed this data into the stereo_odometry node from rtabmap_ros but the odometry images seem to be switching between the left and right image.
Both depth and normal image enabled in the odometry window, first image is normal, second one uses the right image for both the depth image and the normal image shown in this window
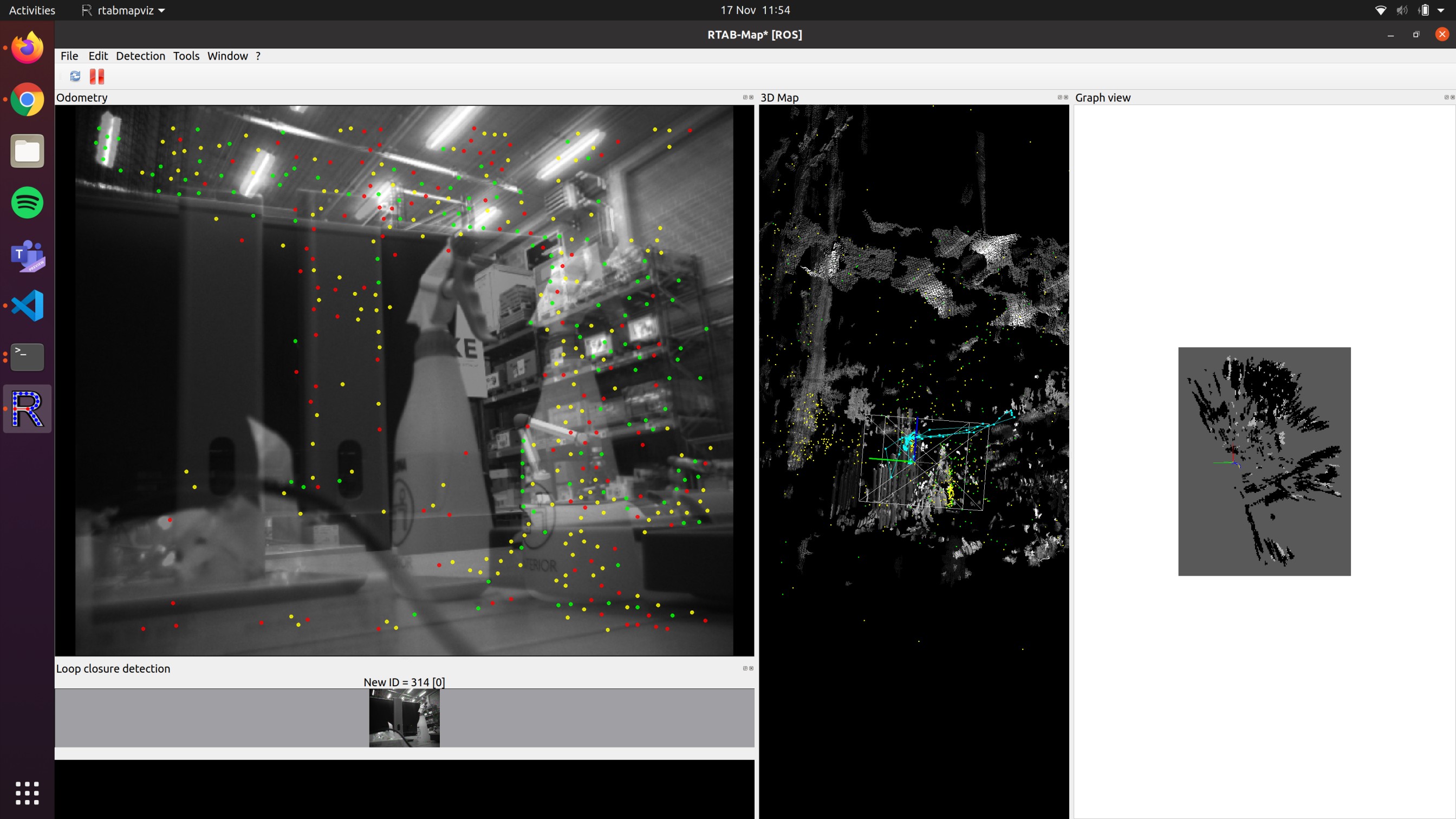
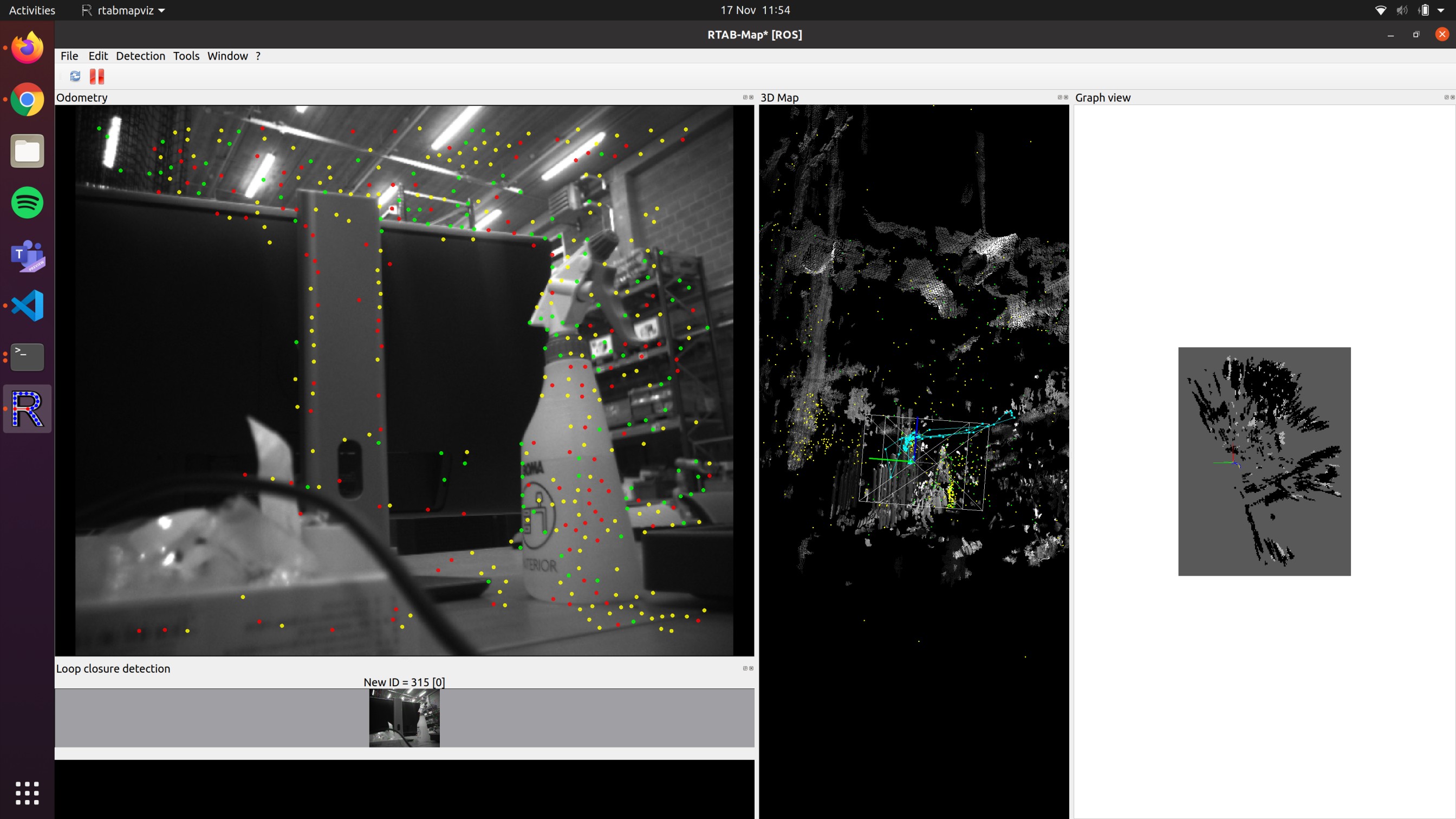
When looking at the 3D map, I can see the a shift in color when the image shifts in the odometry window
Is this normal behaviour?

