Hi,
I'm using rtabmap_ros doing SLAM, the rviz shows the output like the following:
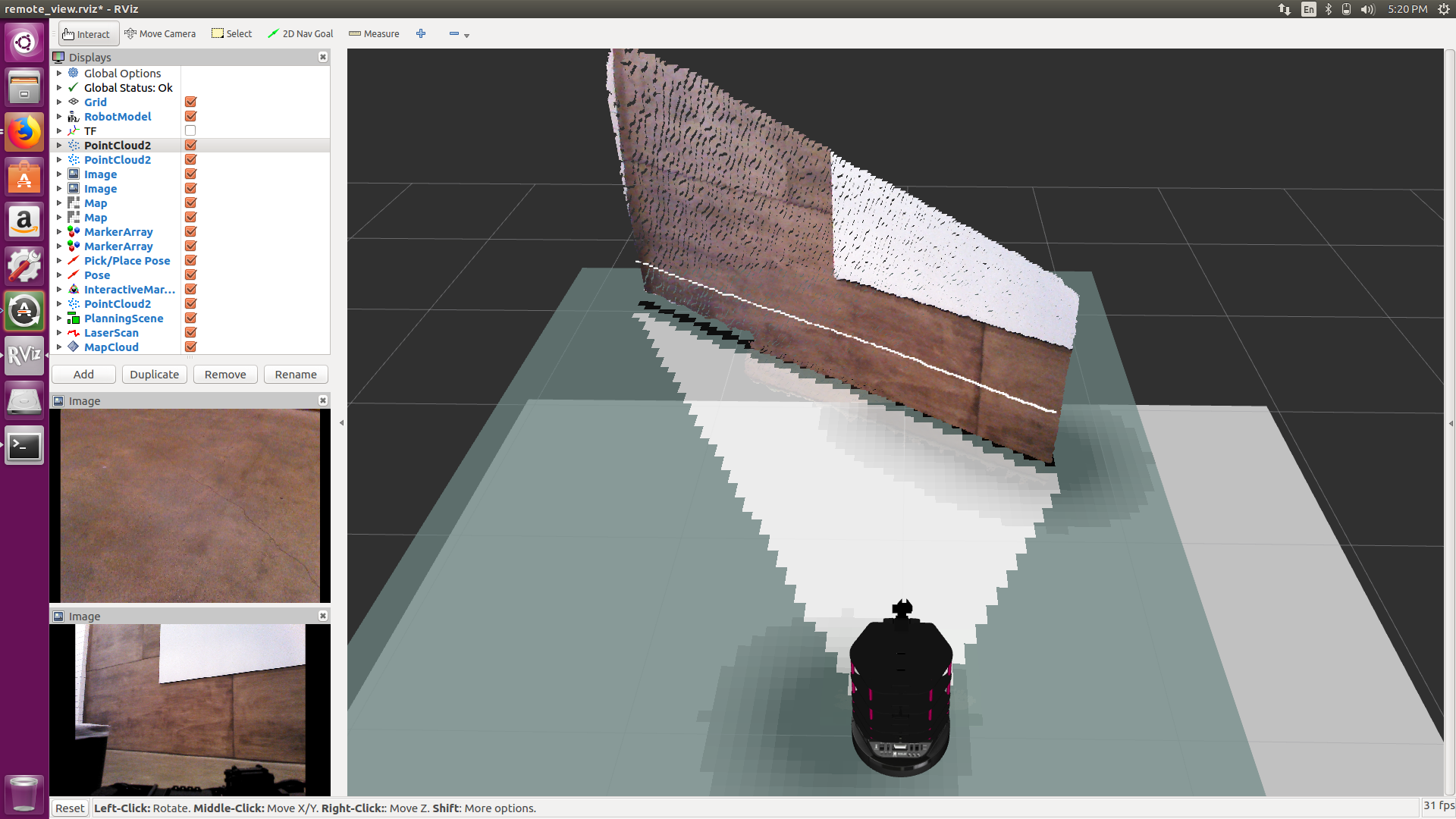
As you could see, the cameras and pointclouds are fine, but when I move the robot around, there is no 3d maps constructed. The error messages that I'm receiving are:
[ WARN] (2018-09-26 17:25:40.706) Rtabmap.cpp:1913::process() Rejected loop closure 1 -> 4595: Not enough inliers after bundle adjustment 0/5 (matches=1) between 4595 and 472259888
I installed chrony to synchronize the clocks between remote pc and robot, but it doesn't help.

