Hi,
I am not able to reproduce the bug, which rtabmap version are you using?
I didn't test on remote, but the following would do the same thing:
$ roslaunch openni2_launch openni2.launch depth_registration:=true
$ roslaunch rtabmap_ros rtabmap.launch rtabmapviz:=false rviz:=true
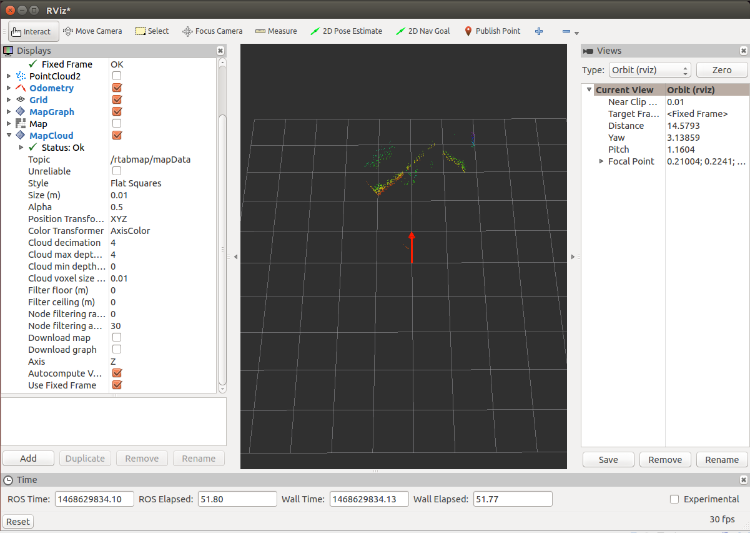
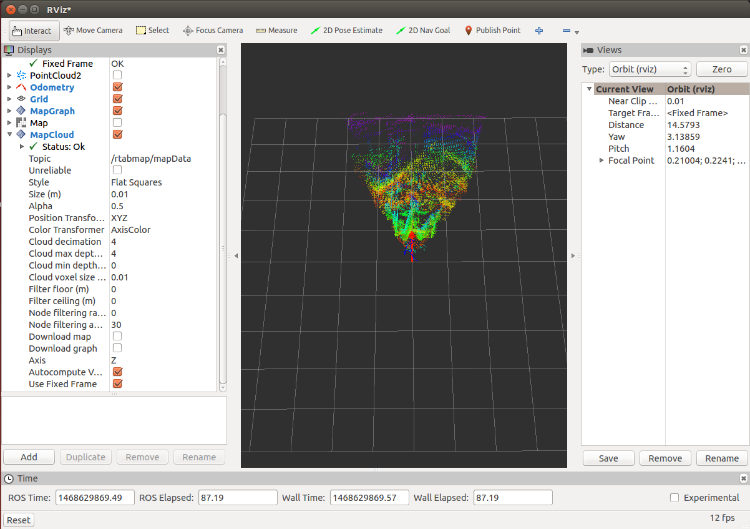
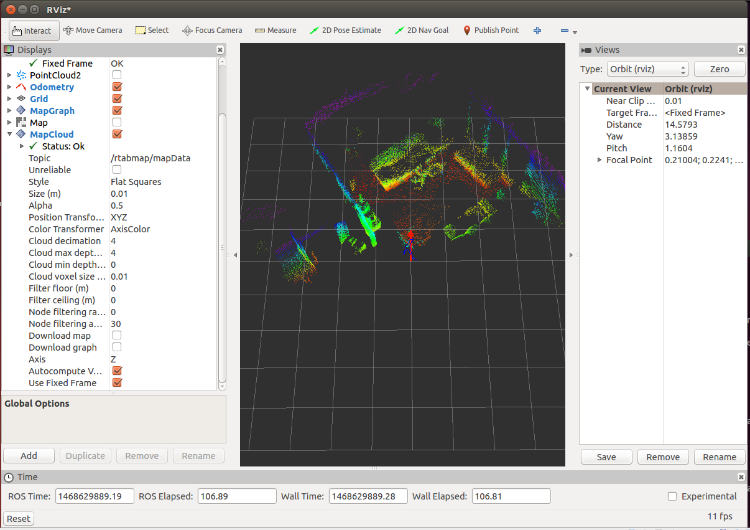
The point clouds are moved when a loop closure happens.
Note that if you reset the map, calling "$ rosservice call /rtabmap/reset", you should uncheck/check the MapCloud plugin in RVIZ to refresh its cache, otherwise it would show old point clouds instead of the new ones.
cheers,
Mathieu