Hi all,
For my hardware set up I have a d455 stereo camera and t265 on top of each other for a handheld mapping.
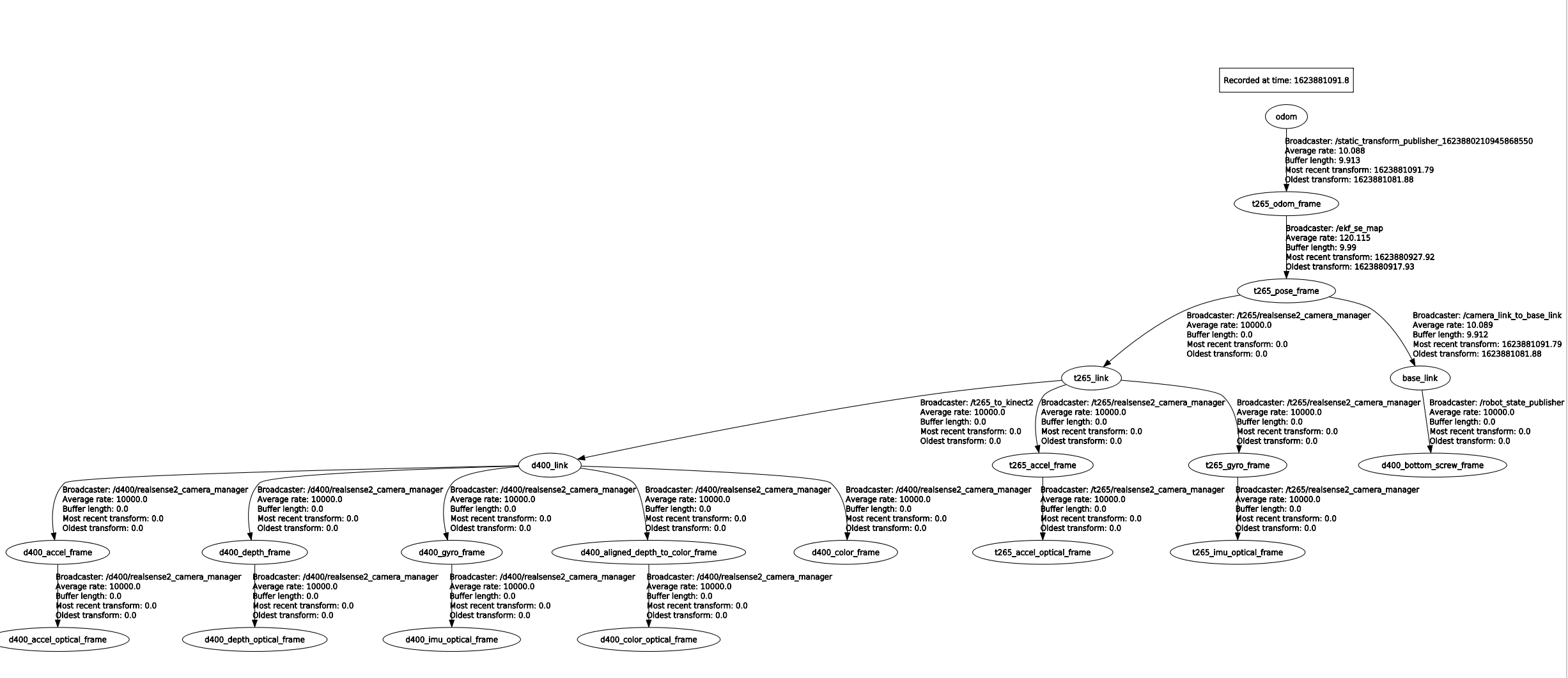
Here is my tf tree:
I'm running robot localization using /t265/odom/sample and /t265/imu as two inputs to obtain /odometry/filtered and /odometry/filtered_map. I'm also running imu_filter_madgwick to obtain /rtabmap/imu topic.
However, when I launch this following cmd:
"roslaunch rtabmap_ros rtabmap.launch \
args:="-d --Mem/UseOdomGravity true --Optimizer/GravitySigma 0.3" \
odom_topic:=/t265/odom/sample \
frame_id:=t265_link \
rgbd_sync:=true \
depth_topic:=/d400/aligned_depth_to_color/image_raw \
rgb_topic:=/d400/color/image_raw \
camera_info_topic:=/d400/color/camera_info \
approx_rgbd_sync:=false \
visual_odometry:=false \
wait_imu_to_init:=true \
imu_topic:=/rtabmap/imu"
I get the following TF Error: TF_NO_FRAME_ID: Ignoring transform with child_frame_id "t265_odom_frame" from authority "/rtabmap/rtabmap" because frame_id not set
at line 233 in /tmp/binarydeb/ros-melodic-tf2-0.6.5/src/buffer_core.cpp
Has anyone encountered this error or knows how to solve it?
I've been stuck at it for two days now..
Thanks.
BR

