Hello Matlabbe,
Im using a kinect sensor and a rplidar for 2D and 3D mapping on Rviz. The problem comes when launching the rtabmap.launch file and the kinect just works for a second. I think that the issue must be related to the tf configuration, but after looking for some solution on internet I havent found any solution. The error is the next:
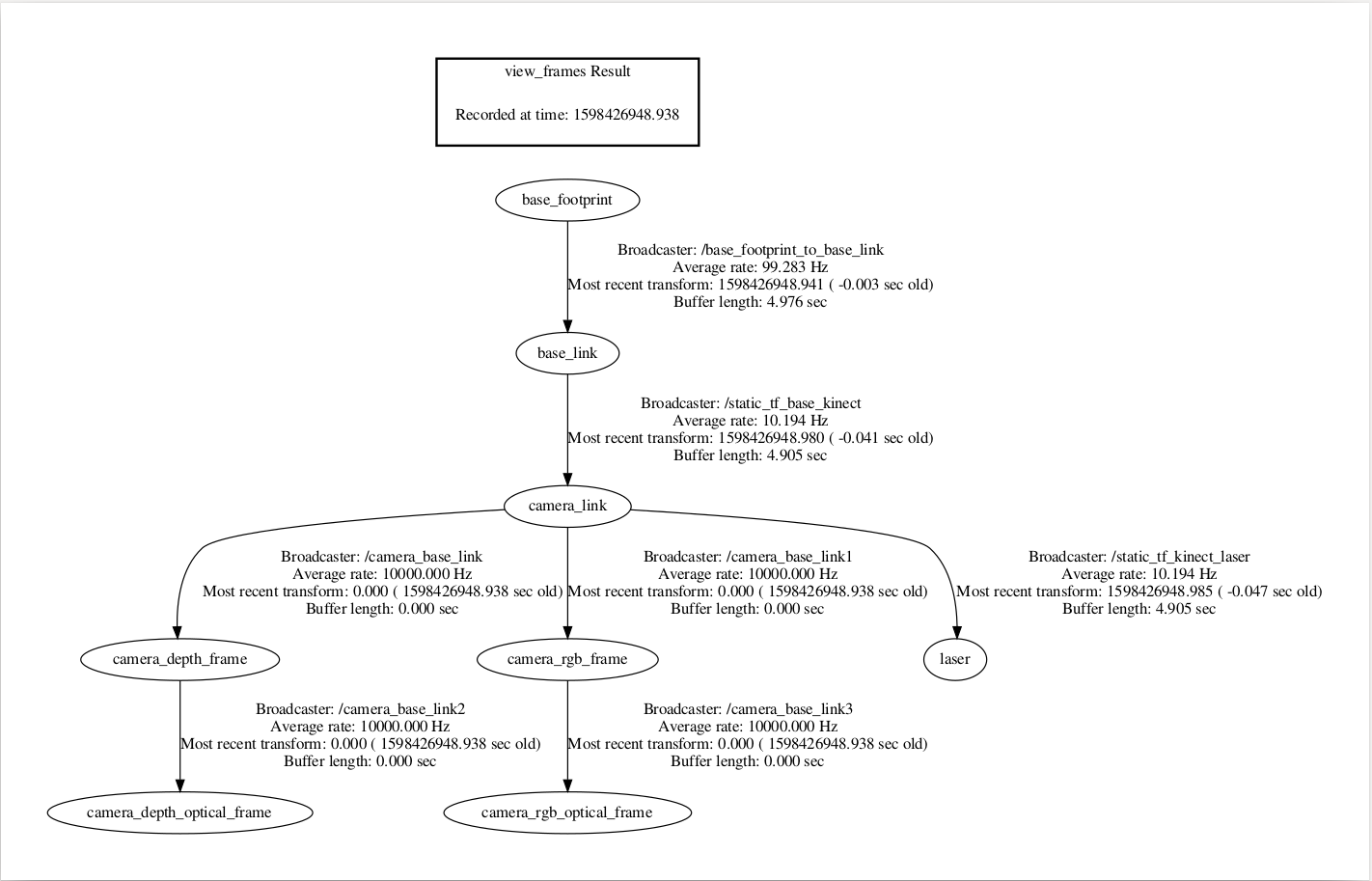
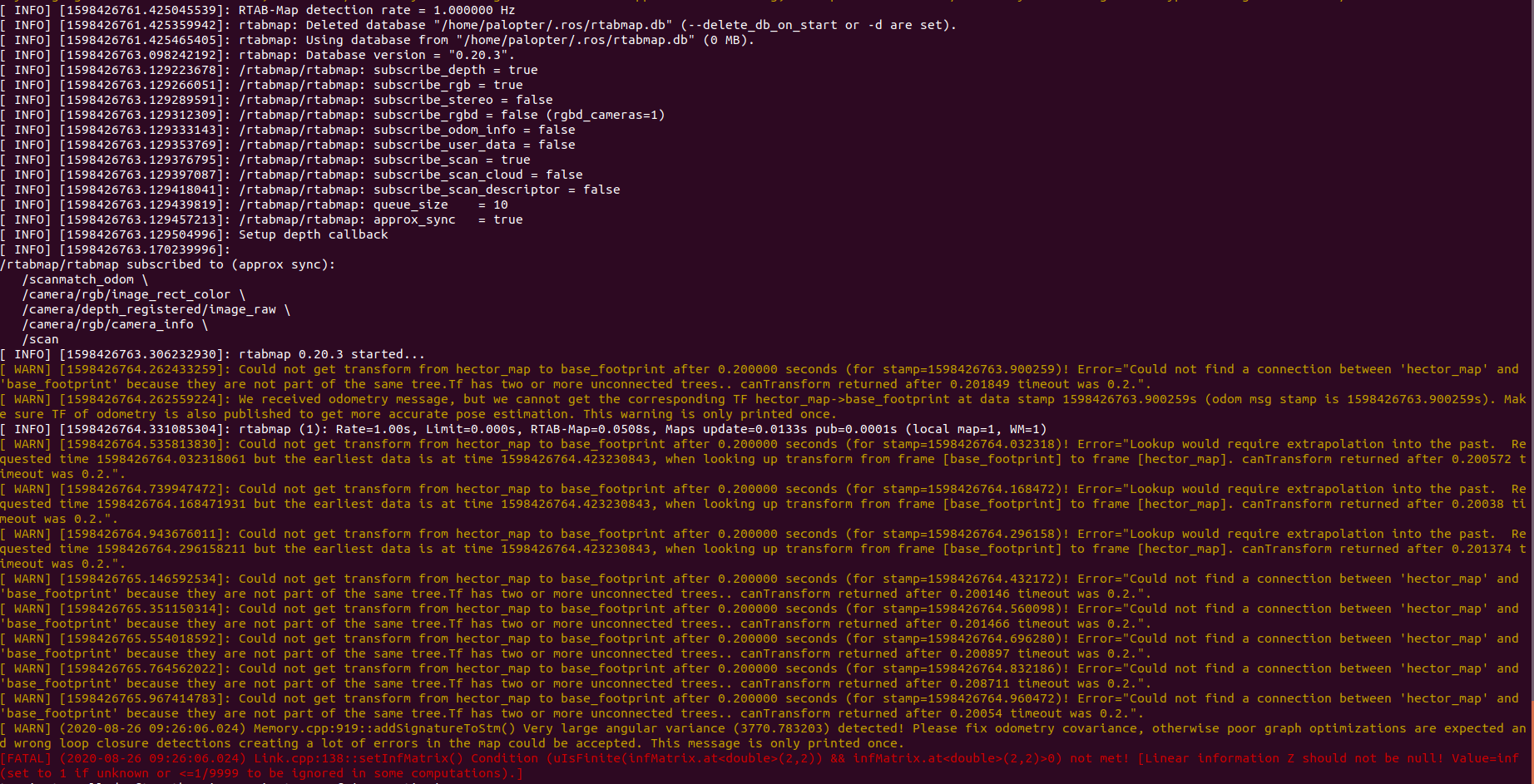
[ WARN] [1598258060.021085182]: Could not get transform from hector_slam to base_link after 0.200000 seconds (for stamp=1598258059.668498)! Error="Could not find a connection between 'hector_slam' and 'base_link' because they are not part of the same tree.Tf has two or more unconnected trees.. canTransform returned after 0.20042 timeout was 0.2.".
[ WARN] [1598258060.021195745]: We received odometry message, but we cannot get the corresponding TF hector_slam->base_link at data stamp 1598258059.668498s (odom msg stamp is 1598258059.668498s). Make sure TF of odometry is also published to get more accurate pose estimation. This warning is only printed once.
[ WARN] [1598258060.225278256]: Could not get transform from base_link to laser after 0.200000 seconds (for stamp=1598258059.796376)! Error="Could not find a connection between 'base_link' and 'laser' because they are not part of the same tree.Tf has two or more unconnected trees.. canTransform returned after 0.201163 timeout was 0.2.".
[ERROR] [1598258060.225372926]: Could not convert laser scan msg! Aborting rtabmap update...
I did the following commands:
$ roslaunch rplidar_ros rplidar.launch
$ roslaunch freenect_launch freenect.launch depth_registration:=true
$ roslaunch rtabmap_utils static_tfs_kinect2_rplidar.launch
$ roslaunch rtabmap_utils display_pushcart.launch
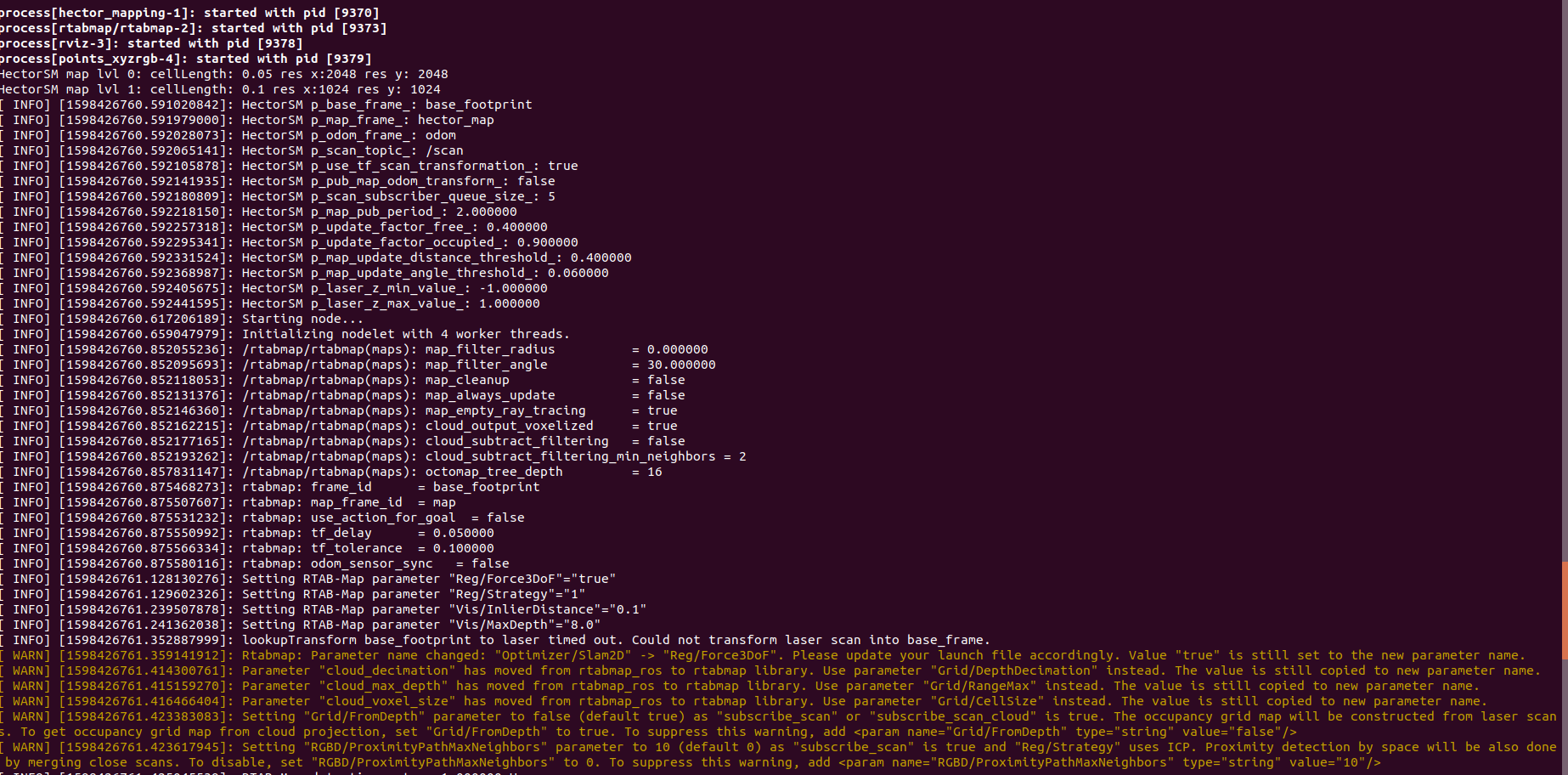
$ roslaunch rtabmap_utils rtabmap.launch hector:=true
The files are the next:
static_tfs_kinect2_rplidar.launch:
<launch>
<node pkg="tf" type="static_transform_publisher" name="static_tf_base_kinect"
args="0.0 0.0 0.0 -1.5707963267948966 0.0 -1.5707963267948966 /base_link /camera_link 100" />
<node pkg="tf" type="static_transform_publisher" name="static_tf_kinect_laser" args="0 0 0 0.01 0 0.01 camera_link laser 100" respawn="true"/>
<node pkg="tf" type="static_transform_publisher" name="camera_to_optical_tf" args="0 0 0 -1.570796 0 -1.570796 camera camera_optical 10" />
<node pkg="tf" type="static_transform_publisher" name="base_footprint_to_base_link" args="0 0 0 0 0 0 base_footprint base_link 10" />
</launch>
display_pushcart.launch:
<?xml version="1.0"?>
<launch>
<arg name="model" default="$(find rtabmap_utils)/urdf/pushcart.urdf"/>
<node pkg="robot_state_publisher" type="state_publisher" name="robot_state_publisher">
</node>
<node pkg="tf" type="static_transform_publisher" name="static_tf_base_link" args="-0.3 0.0 -0.425 0.0 0.0 0.0 laser base_link 100" respawn="true"/>
</launch>
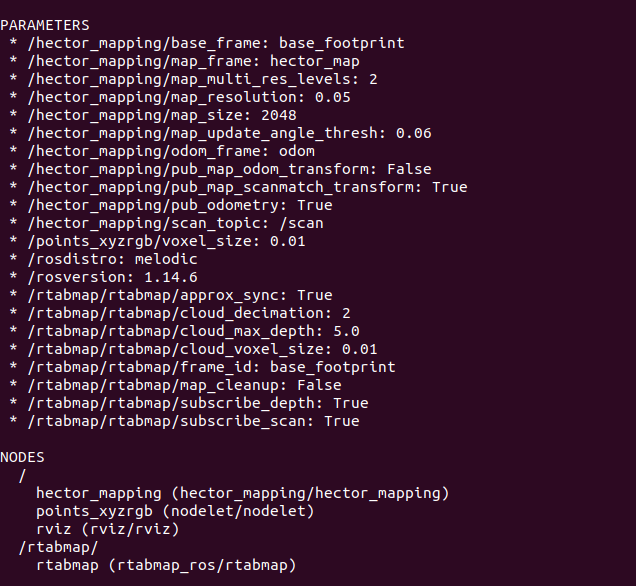
rtabmap.launch:
<launch>
<arg name="resolution" default="sd" />
<arg name="frame_id" default="laser"/>
<arg name="rtabmapviz" default="true" />
<arg name="rviz" default="true" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
</node>
<group ns="rtabmap">
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<remap from="rgb/image" to="/camera/rgb/image_rect_color"/>
<remap from="depth/image" to="/camera/depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<remap from="scan" to="/scan"/>
<remap from="odom" to="/scanmatch_odom"/>
</node>
</group>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find rtabmap_utils)/rviz_configs/kinect_rtabmap_with_hector.rviz"/>
<node pkg="nodelet" type="nodelet" name="points_xyzrgb" args="load rtabmap_ros/point_cloud_xyzrgb standalone_nodelet">
<remap from="rgb/image" to="data_odom_sync/image"/>
<remap from="depth/image" to="data_odom_sync/depth"/>
<remap from="rgb/camera_info" to="data_odom_sync/camera_info"/>
<remap from="cloud" to="voxel_cloud" />
</node>
</launch>
What am I doing wrong? Could you help me?