Hello,
I am trying to fuse LiDAR ICP odometry with wheel encoder odometry using robot_localization, and I’m running into a TF tree issue that breaks deskewing in RTAB-Map.
My launch file is very similar to this one https://github.com/introlab/rtabmap_ros/blob/ros2/rtabmap_examples/launch/lidar3d.launch.py.
If I only use the odometry coming from ICP, my tf tree is correct, with map -> odom -> base_link_stabilized -> base_link.
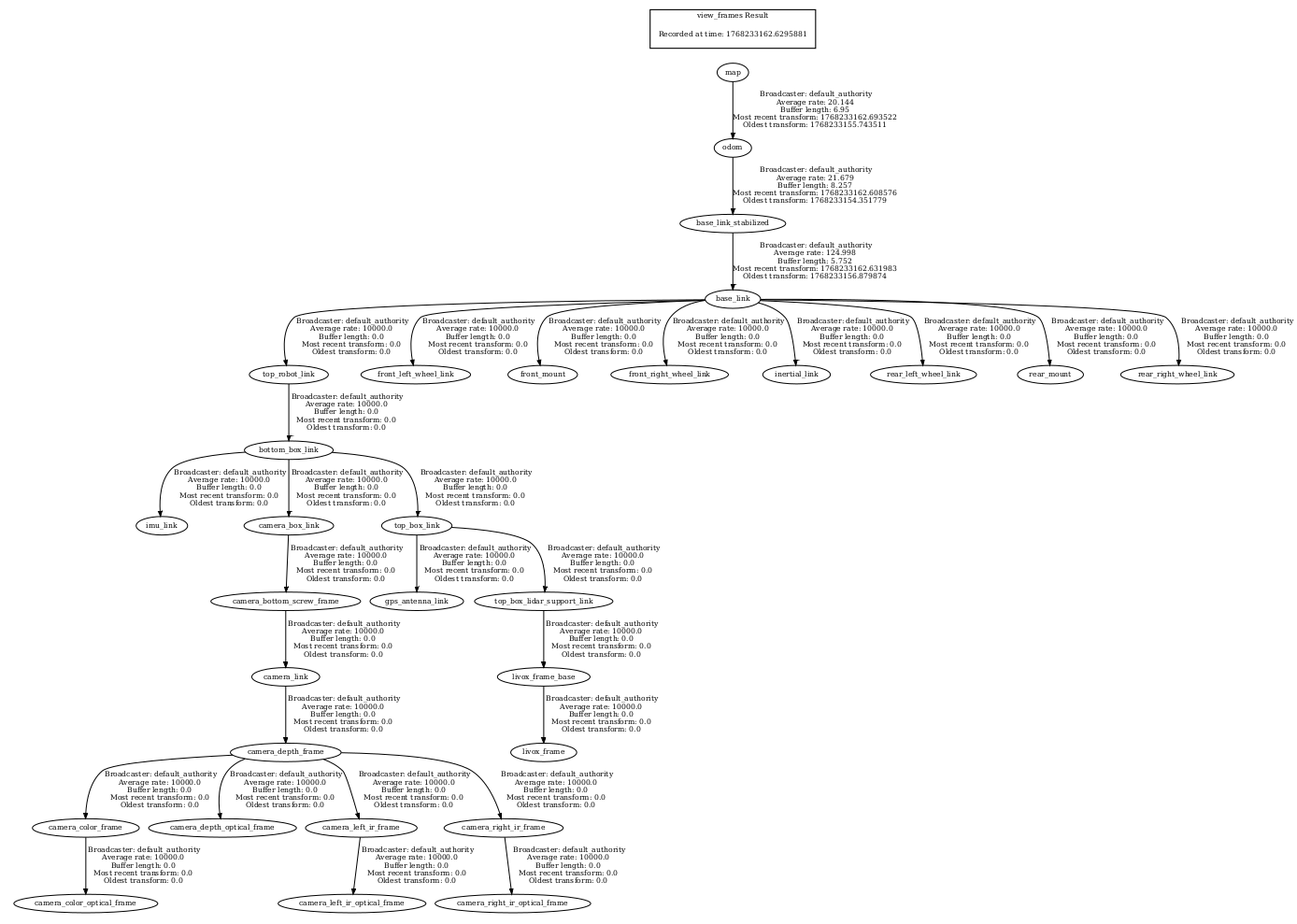
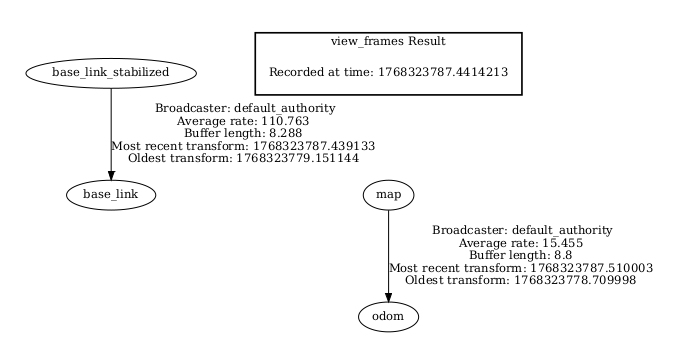
When I want to use robot_localization to fuse my odometries, base_link_stabilized gets created and becomes a parent of base_link, and at the same time, the fused odometry frame (e.g. odom) also tries to be the parent of base_link, which results in a TF tree that is not a tree anymore.
Here are my frames configuration in my ekf.yaml file. I was thinking to circumvent this, I could put base_link_stabilized instead of base_link in base_link frame which produce a correct tree, but it feels wrong conceptually and when the robot spins in place, the SLAM pose estimate drifts and the map becomes inconsistent.
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
Should LiDAR deskewing be disabled or avoided in this case?
Is there a known best practice for combining LiDAR deskwing and odometry fusion with robot_localization?

