Hi Matlabbe
Many thanks for your on time help every time.

Now I know the problem is the TF tree. And I made a new test using TUM dataset. It works very well in office environment. But you know, the TUM dataset includes office and industrial environment data. My work is focus on industrial environment.
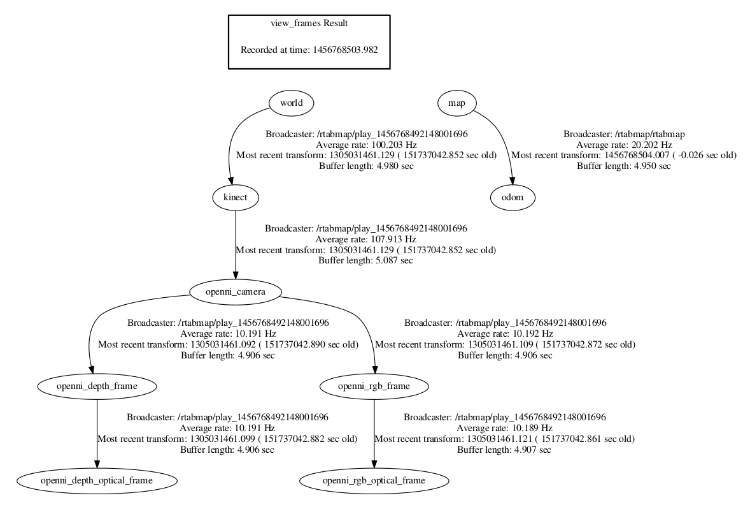
So I made tests using the industrial hall data fr2/large_with_loop. During the whole progress, there are three times visual odometry lost like below:
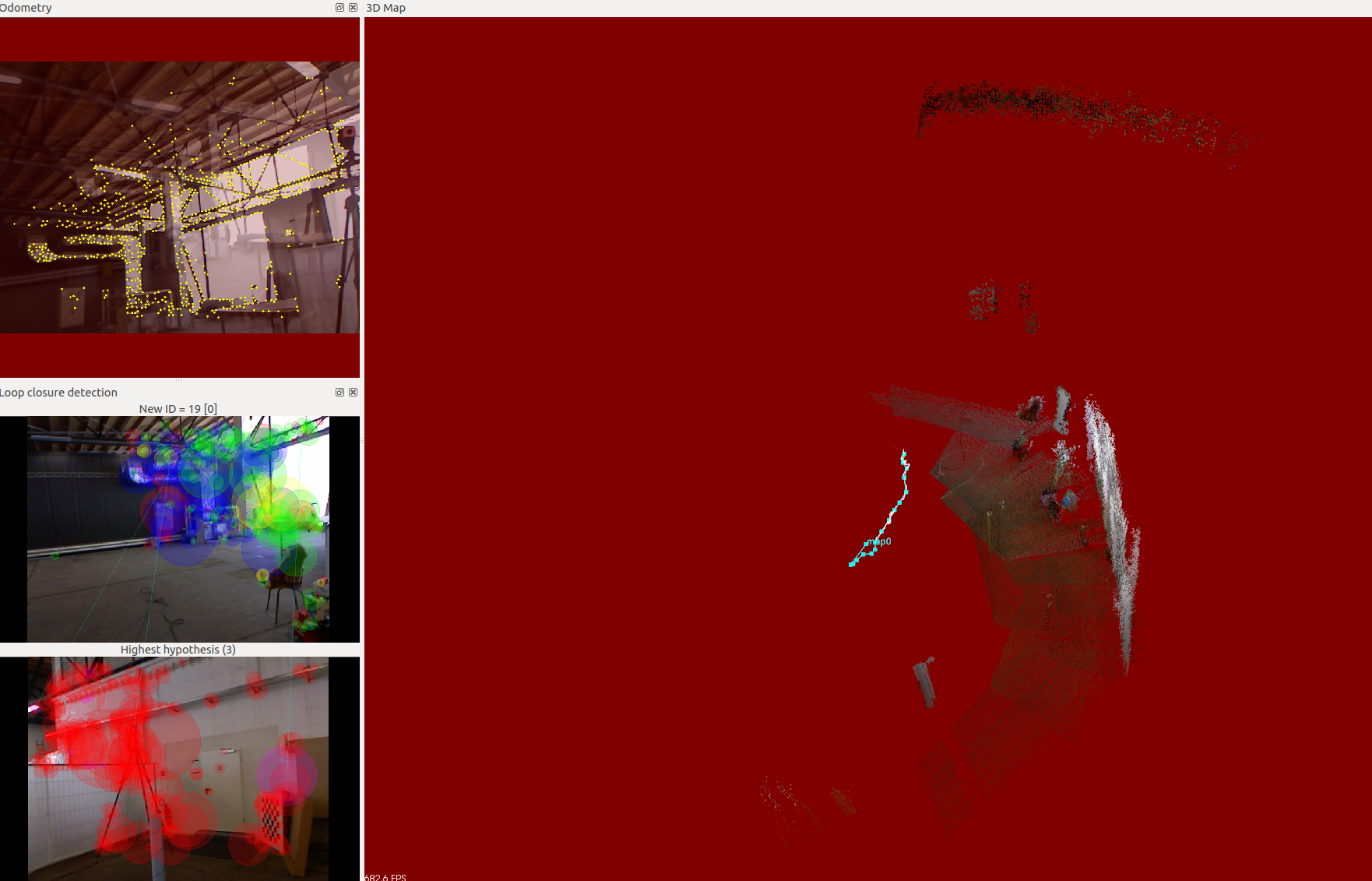
And I had decompressed the bag data and add the parameter to VO
param name="GFTT/MinDistance" type="string" value="5"
param name="Odom/MinInliers" type="string" value="10"
Then I run:
$ roslaunch rtabmap_ros rgbdslam_datasets.launch rtabmapviz:=true rviz:=false
$ rosbag play --clock -r 0.2 rgbd_dataset_freiburg2_large_with_loop.bag
Any suggestions to how to handle this? Should I adjust some parameters of rtabmap?