Hi,
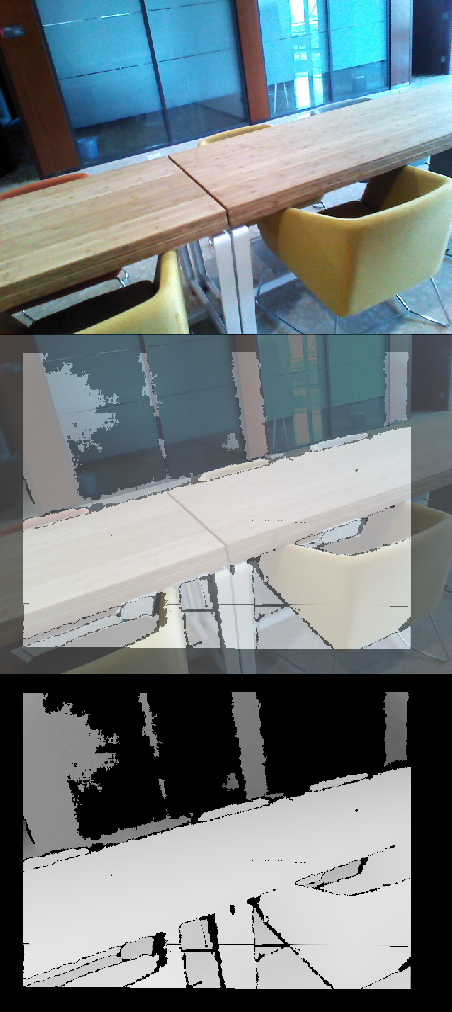
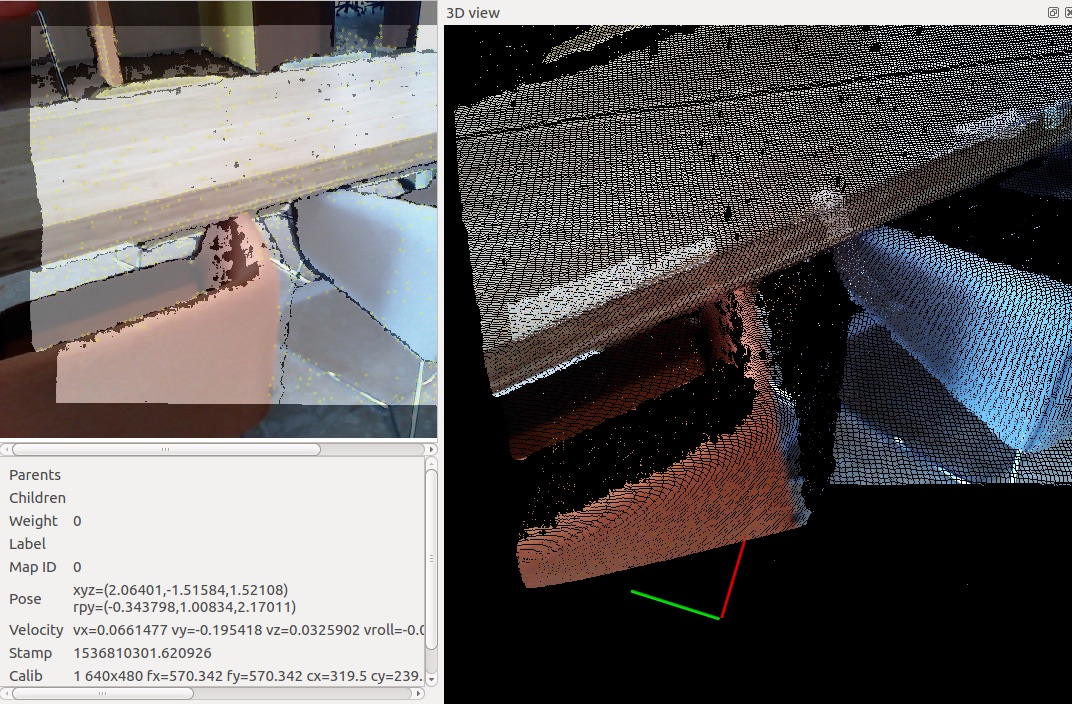
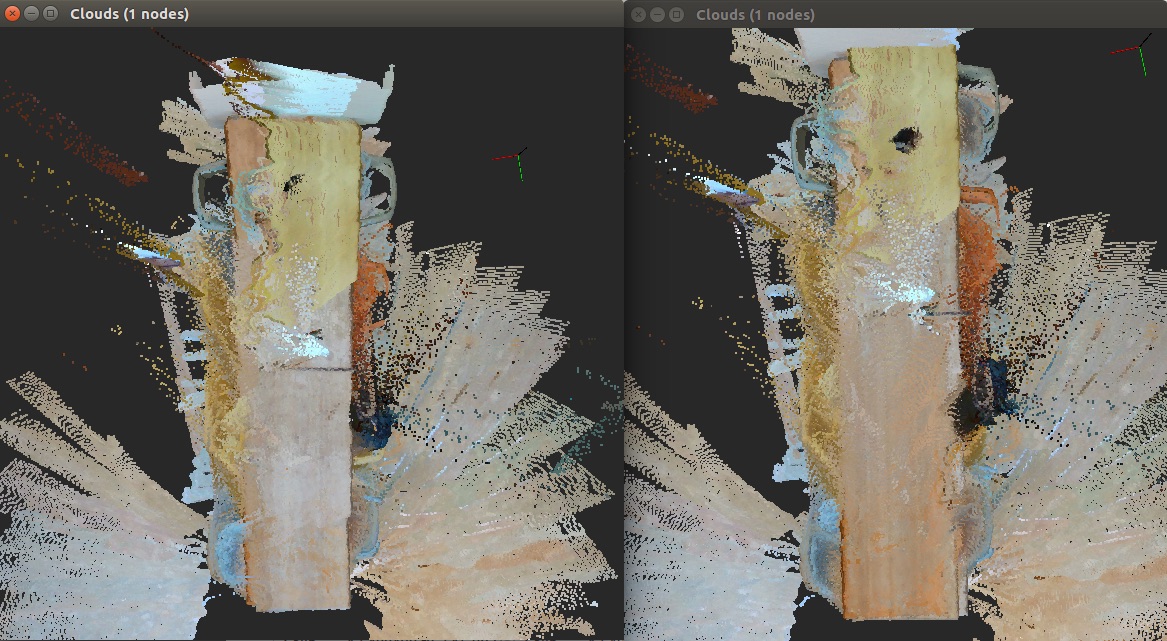
For the orbbec database, there are some registration errors, the depth image is not exactly matching the color image (look at the red chair):
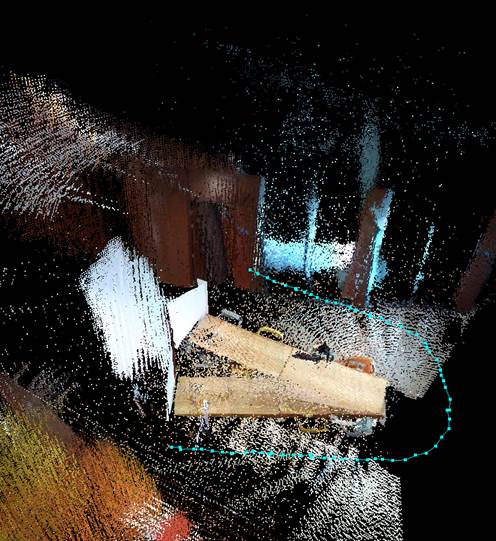
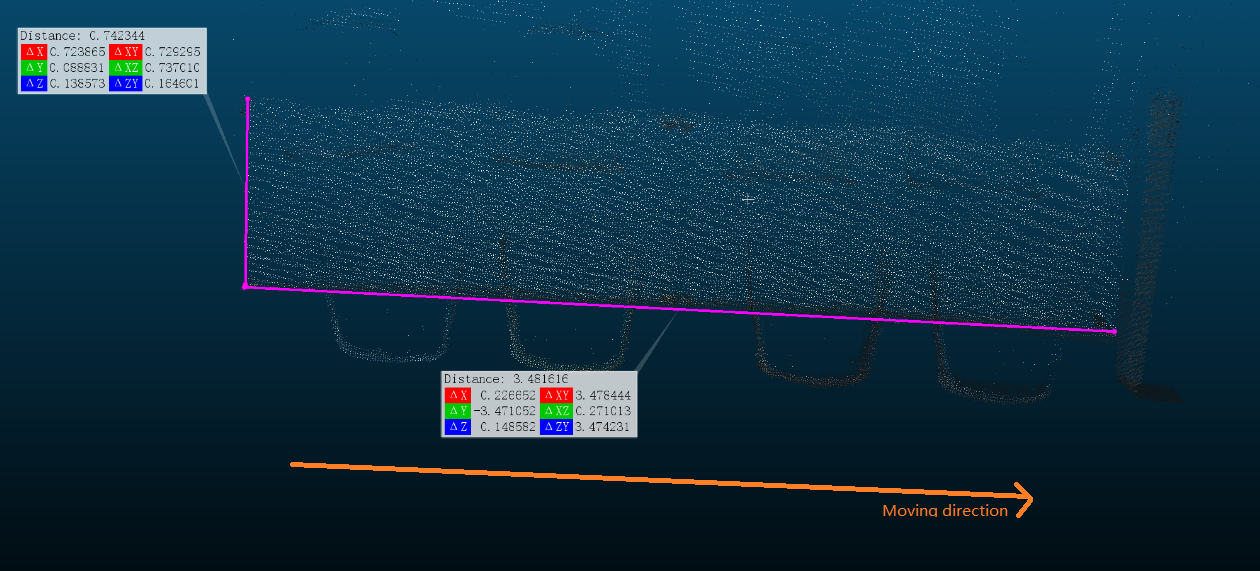
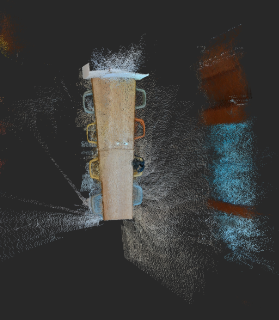
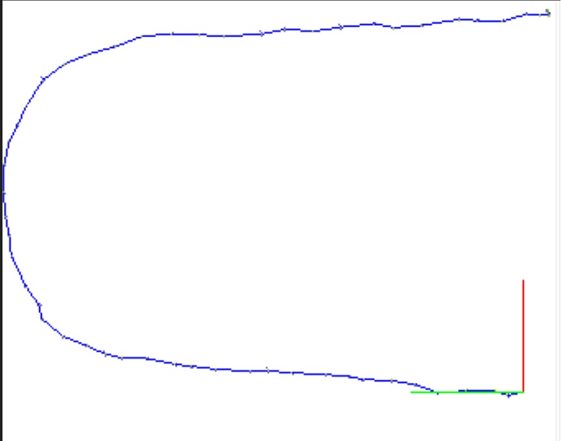
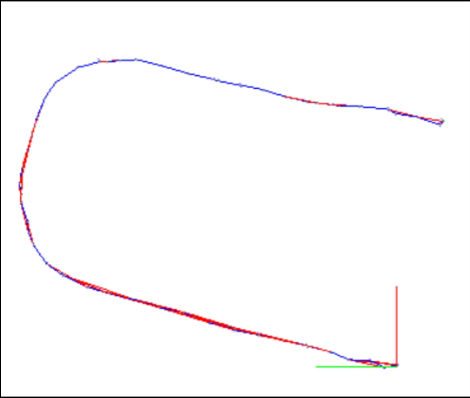
For the realsense database, adding more local (between consecutive nodes) loop closures would not add really more accuracy than the odometry provide. Here is a comparison
without and
with loop closures respectively:


Having a real loop closure between the beginning and the end would help more to correct the odometry drift. For this kind of path (no real loop closure), I would try to tune OdomF2M parameters:
$ rtabmap --params | grep OdomF2M
Param: OdomF2M/BundleAdjustment = "1" [Local bundle adjustment: 0=disabled, 1=g2o, 2=cvsba.]
Param: OdomF2M/BundleAdjustmentMaxFrames = "10" [Maximum frames used for bundle
Param: OdomF2M/MaxSize = "2000" [[Visual] Local map size: If > 0 (example 5000), the odometry will maintain a local map of X maximum words.]
As odometry F2M does local bunble adjustment between local frames, it should give better optimized transforms locally. If you still want to add loop closures on consecutive nodes in real-time, set RGBD/ProximityDetectionByTime to true.
$ rtabmap --params | grep ProximityByTime
Param: RGBD/ProximityByTime = "false" [Detection over all locations in STM.]
There is indeed no ROS service to call "Detect more loop closures", though it would be possible to add the interface, I opened an
issue about that.
Finally, RTAB-Map on Google Tango uses the visual-inertial odometry approach from Google, which gives better odometry than RTAB-Map's odometry approach, explaining why you can get better results on Tango than with the cameras alone.
cheers,
Mathieu