Hi,
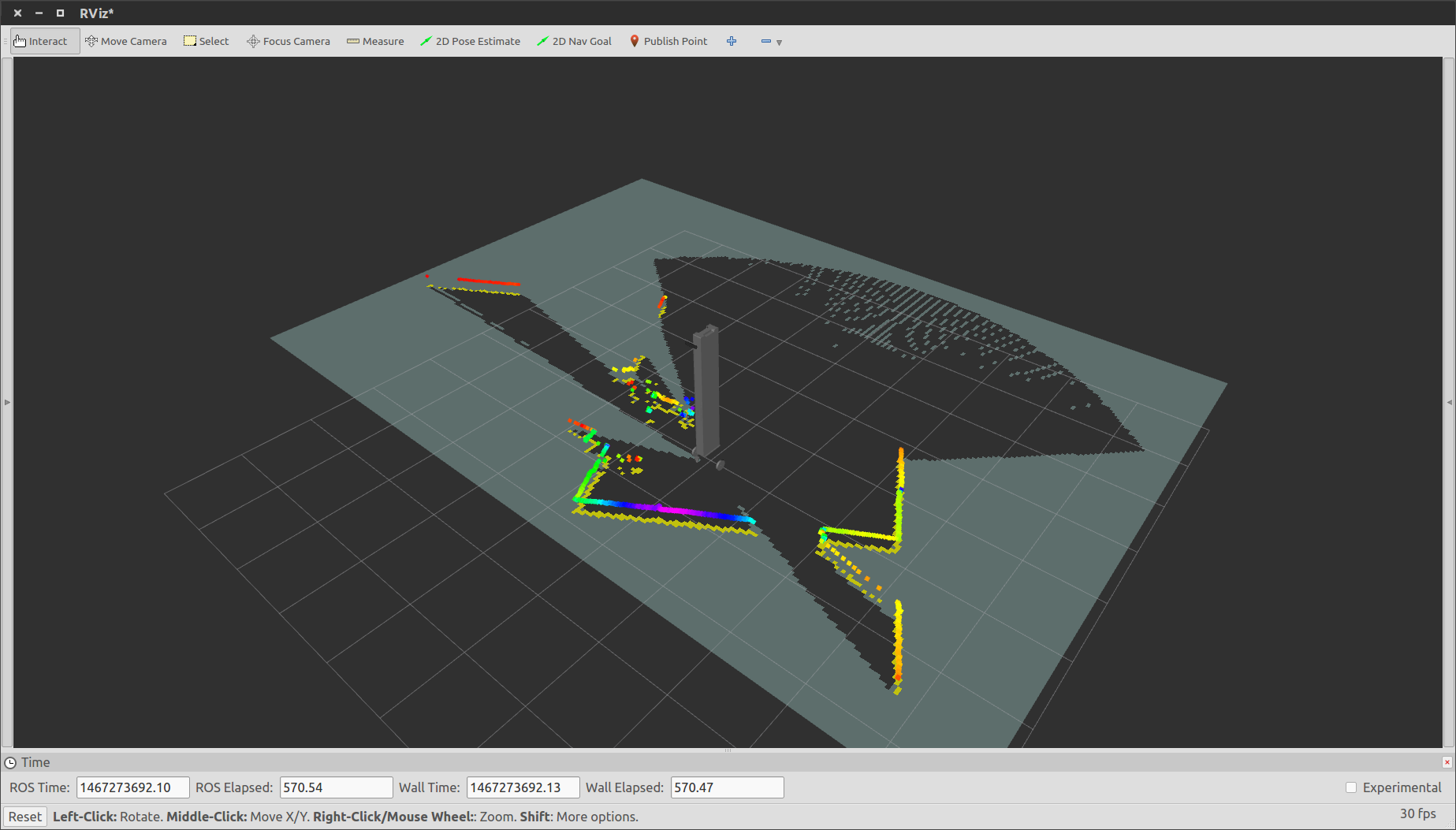
First of all, impressive work. I'm using rtabmap_ros and I was trying to abtain the grid_map message for navigation purposes and I realized that the back of the robot, which is out of the range of the laser sensor, gets raytraced as seen in the image. The LaserScan messages look OK. That's an example one (without range and intensity data):
header:
seq: 57105
stamp:
secs: 1467274414
nsecs: 615120692
frame_id: hokuyo_laser_link
angle_min: -2.35619449615
angle_max: 2.35619449615
angle_increment: 0.00436332309619
time_increment: 1.73611151695e-05
scan_time: 0.0250000003725
range_min: 0.019999999553
range_max: 30.0
The number of elements in intensities and ranges fields are 1081 as expected.
I could not find any proper parameter to tune (neither in the library nor in rtabmap_ros) not even a related topic. Is there a way to correct it? Is it a problem of my rtabmap setup?
In case that helps, I launch rtabmap with:
<arg name="camera_front" default="/camera_front_cam"/>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<remap from="scan" to="/scan_raw"/>
<remap from="rgb/image" to="$(arg camera_front)/rgb/image_rect_color"/>
<remap from="depth/image" to="$(arg camera_front)/depth/image_rect"/>
<remap from="rgb/camera_info" to="$(arg camera_front)/rgb/camera_info"/>
</node>
Thanks

