Hi,
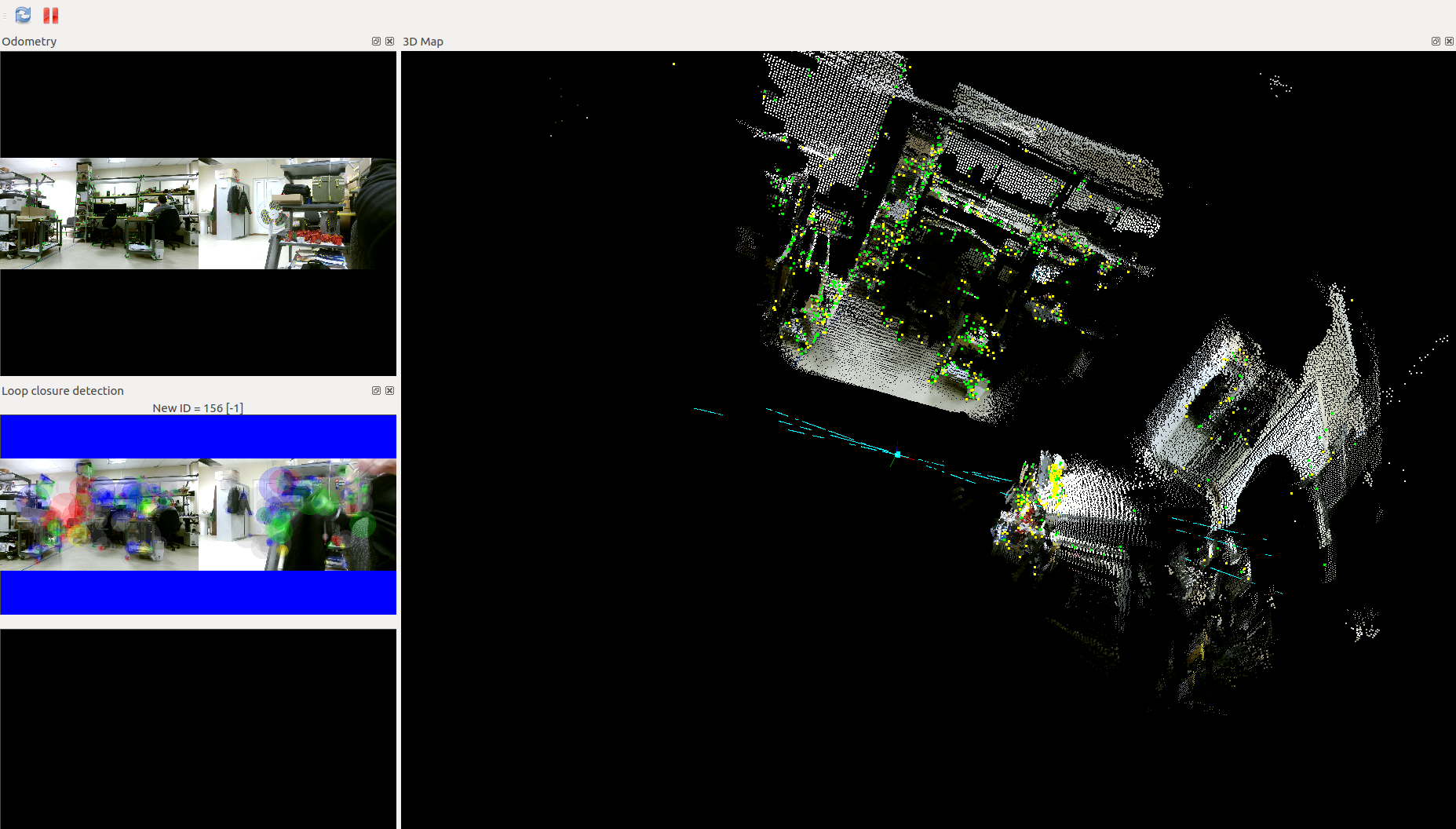
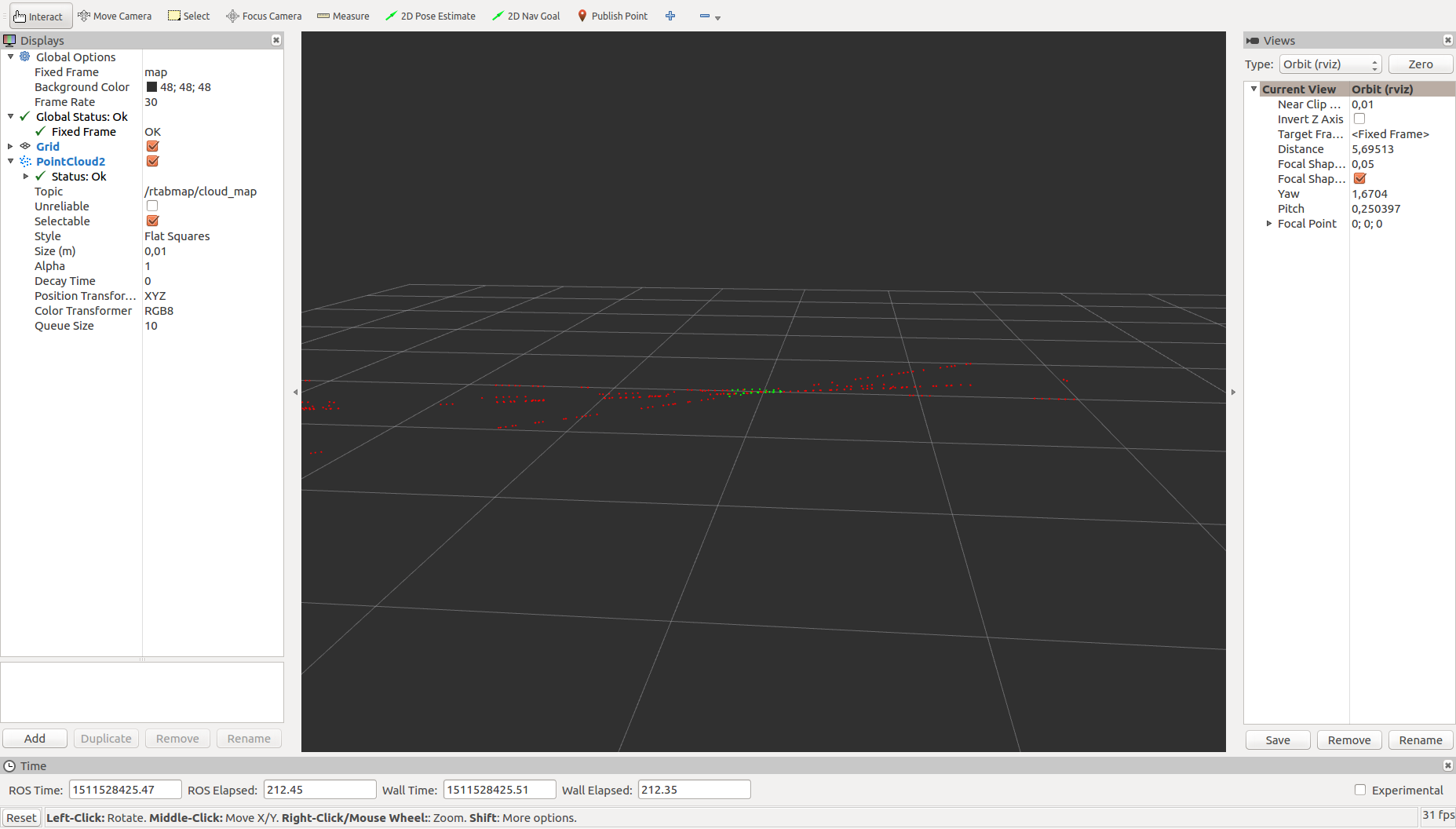
The blue line strips are laser scan points. "gen_scan" parameter is failing creating a fake laser scan from the kinects. I tried the demo "as is" and it works. In your launch file, you set:
<node pkg="tf" type="static_transform_publisher" name="base_to_camera2_tf"
args="0.35 0.0 0.0 0.0 1.57 0.0 /base_link /camera2_link 100" />
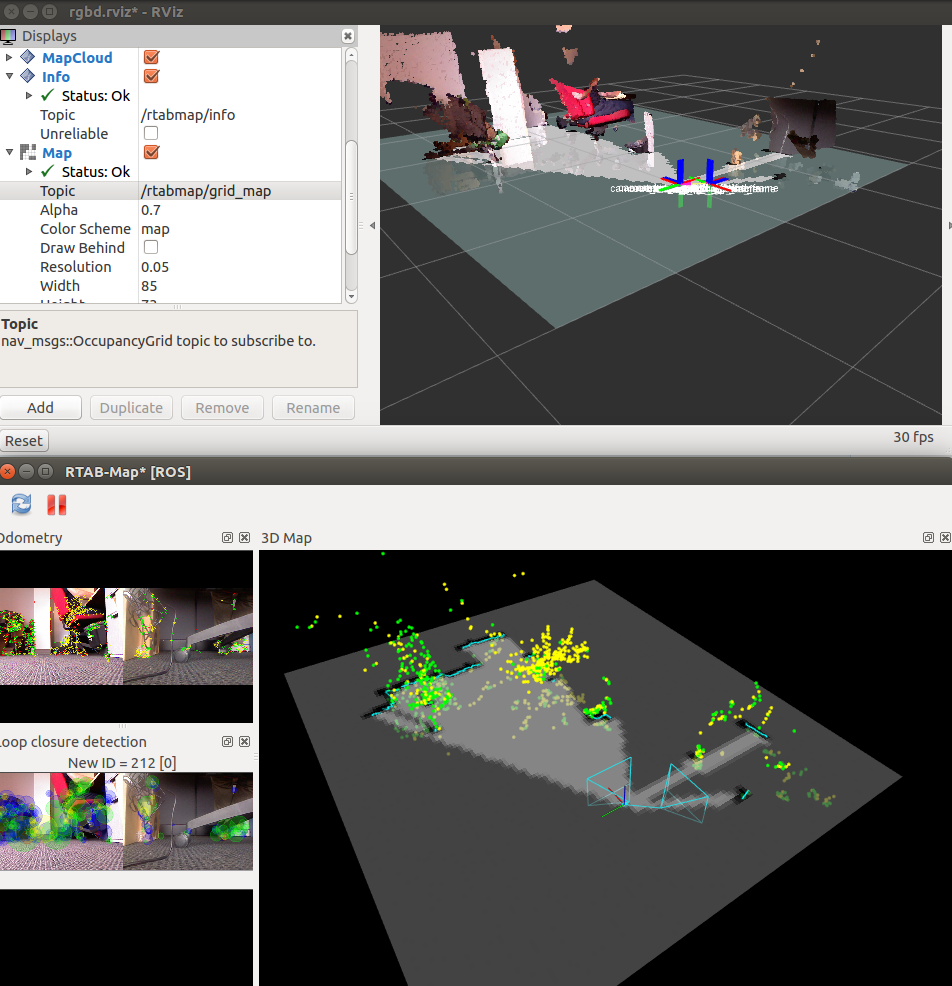
The 90 deg pitch rotation is the problem. I tried with yaw rotation like the demo "0.35 0.0 0.0 1.57 0.0 0.0" and the laser scans are generated correctly. I don't know exactly how you fixed the kinects, but if they are not placed in a configuration similar as the demo (see screenshot below from this
post), set gen_scan to false to avoid creating laser scans. Set Grid/FromDepth to true if you want cloud_map from the kinect clouds.
cheers,
Mathieu