Question update.
The update concerns the following quote but the "spirit" of the question does not change that much in order to start a new thread.
Mikor wrote
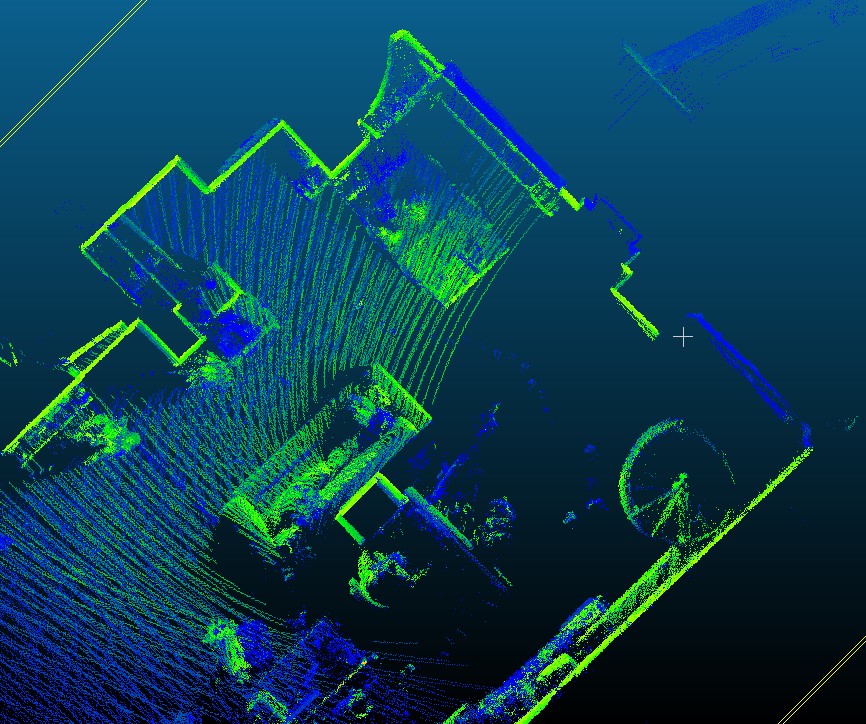
EDIT: After further investigation I noticed that this happens when I reduce the publish rate and I include every scan in the solution, but when i increase it and cover the area sparsely the noise/mild misalignment does not exist and it got me confused, do you have any suggestions ?
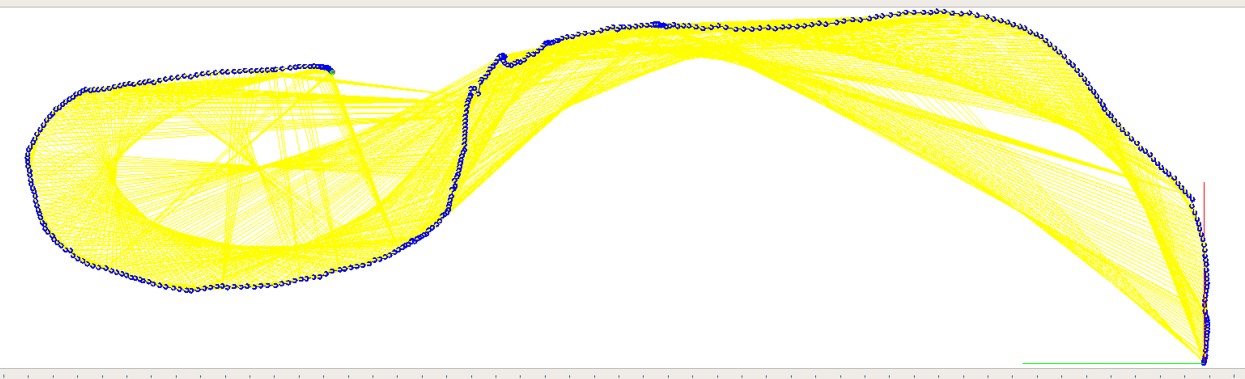
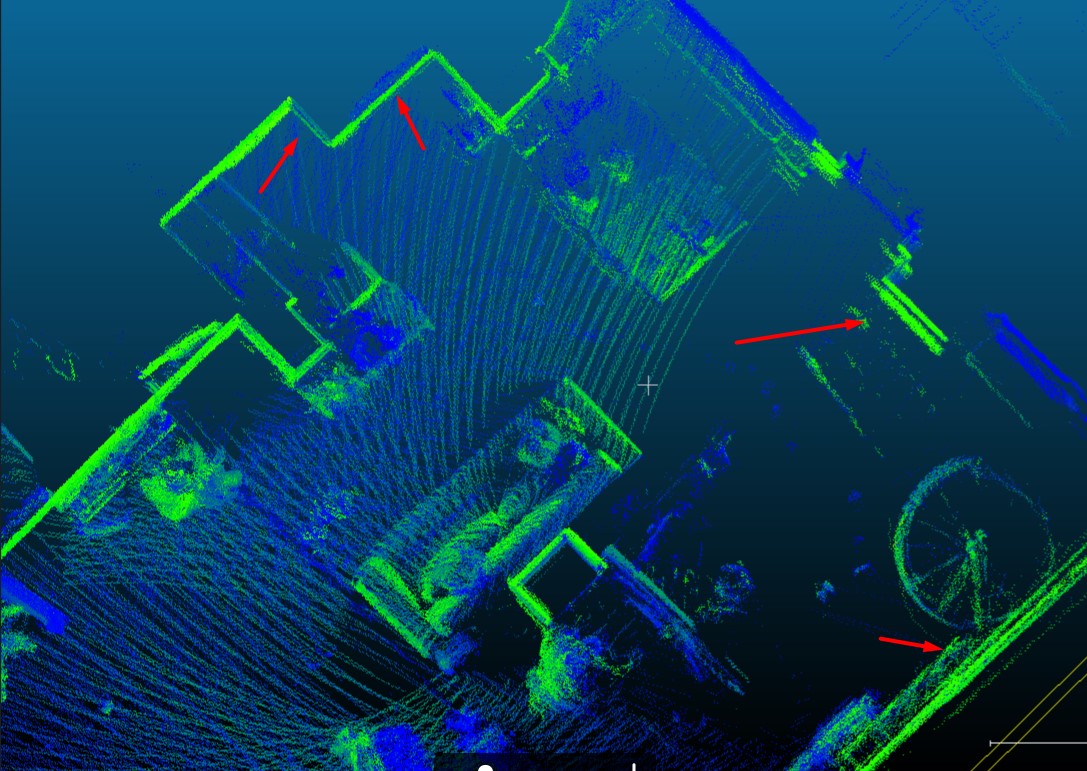
So in a few words, the problem is that the highest the publishing rate the less the nodes that I get as an output. And to connect it to the initial question, it seems that when the nodes are less things work better or more clearly, for example when the publishing rate is set to 0.001 many more nodes are being created and there are misalignment issues but when the publishing rate is too high the registration is clean with no misalignment but with poor point density. For every test the detection rate remains at 0.
When I play the bag with publishing rate of 1 I get 84 nodes and with publishing rate set at 0.05 I get 793 nodes.
I try to understand why is this happening. First of all, since the ICP parameters seem to be working at the sparser data, I can not understand why is not this the case when the data are not sparse (publish rate 0.001 for example), is it possible to set the publishing rate too low?
Also, I understand that rtabmap "catches" a scan and starts working on it and after it is done with it it starts with the next scan that is passed at the current moment so this is why it gets sparser with less nodes, am I correct?
If you need need extra information, feel free to ask everything that would be helpful to examine the case.
Thank you in advance,
Anthony