It seems the odometry is drifting a lot more than the estimated covariance. Good loop closures are then wrongly rejected. Using RGBD/OptimizeMaxError=3 makes almost all loop closures rejected (over the threshold here when plotting the statistics):
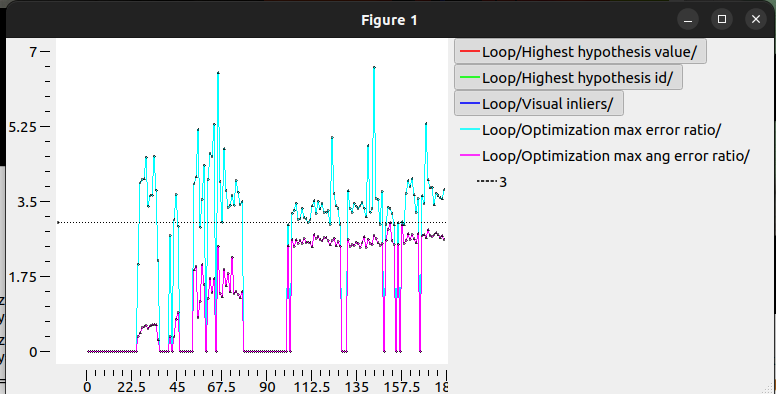
To accept all appropriate loop closures, I had to increase RGBD/OptimizeMaxError parameter from 3 to 10:
rtabmap-reprocess --RGBD/OptimizeMaxError 10 260206-201858.db output.db
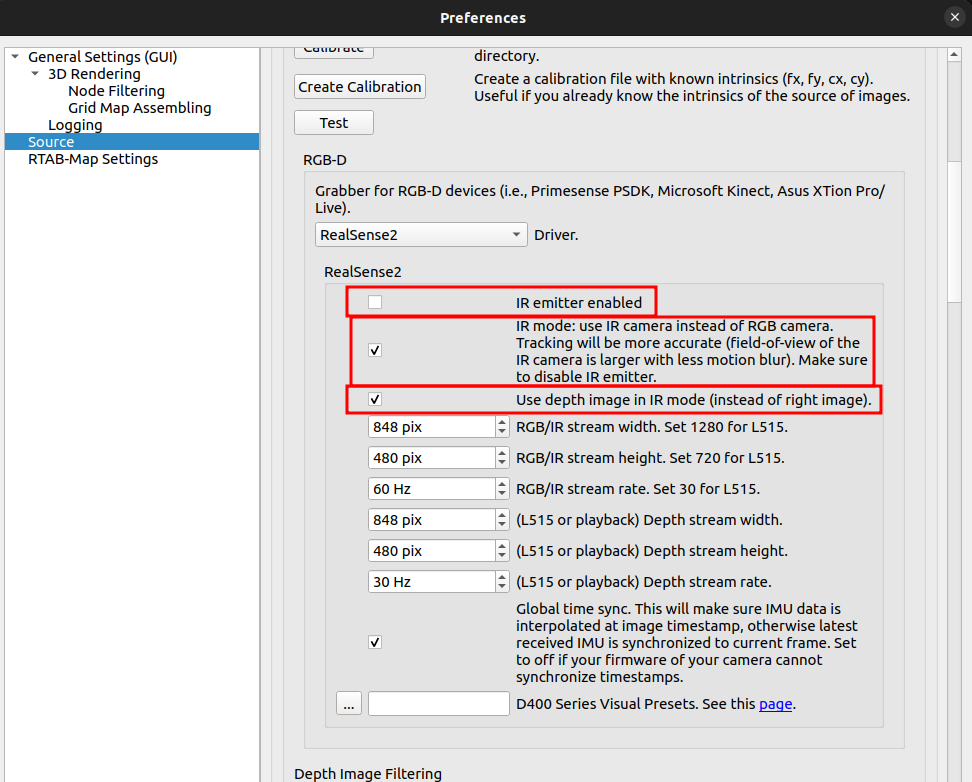
Note that something annoying with D435i is that the color camera FOV is smaller than the IR camera and it has more motion blur. Using IR cameras for visual odometry is recommend with that camera, at the cost of not being able to use the IR emitter anymore (textureless surfaces will be harder to see and less accurate).