Thanks for sharing, I tried the dataset in the standalone version (directory of stereo images + rectification enabled) with this calibration:
"bicocca_calib_left.yaml"
%YAML:1.0
---
camera_name: bicocca_calib_left
image_width: 640
image_height: 480
camera_matrix:
rows: 3
cols: 3
data: [ 6.6047200699999996e+02, 0., 3.1609229900000003e+02, 0.,
6.6047200699999996e+02, 2.1427980900000000e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ -2.7007730485883452e-01, 0., -1.3143024456984870e-04, 0.,
1.9823091285521721e-01 ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 9.9947380074257286e-01, 2.8028135809627101e-02,
1.6326213040173919e-02, -2.8013763049520503e-02,
9.9960692298331477e-01, -1.1084239418636529e-03,
-1.6350862637835521e-02, 6.5048202640513532e-04,
9.9986610411801236e-01 ]
projection_matrix:
rows: 3
cols: 4
data: [ 6.8930182551354210e+02, 0., 3.0540074539184570e+02, 0., 0.,
6.8930182551354210e+02, 2.2811547279357910e+02, 0., 0., 0., 1.,
0. ]
local_transform:
rows: 3
cols: 4
data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ]
"bicocca_calib_right.yaml"
%YAML:1.0
---
camera_name: bicocca_calib_right
image_width: 640
image_height: 480
camera_matrix:
rows: 3
cols: 3
data: [ 6.6476301500000000e+02, 0., 3.2734811100000002e+02, 0.,
6.6476301500000000e+02, 2.4536088400000000e+02, 0., 0., 1. ]
distortion_coefficients:
rows: 1
cols: 5
data: [ -2.9385724883178782e-01, 1.4126458924224591e-01, 0.,
1.7949559052512960e-03, 0. ]
distortion_model: plumb_bob
rectification_matrix:
rows: 3
cols: 3
data: [ 9.9913931020706770e-01, 3.3554143770965016e-02,
2.4387665627166735e-02, -3.3575586030339631e-02,
9.9943607047475580e-01, 4.7016667066965512e-04,
-2.4358136662403836e-02, -1.2885921683592969e-03,
9.9970246609106617e-01 ]
projection_matrix:
rows: 3
cols: 4
data: [ 6.8930182551354210e+02, 0., 3.0540074539184570e+02,
-1.2476243955923299e+02, 0., 6.8930182551354210e+02,
2.2811547279357910e+02, 0., 0., 0., 1., 0. ]
local_transform:
rows: 3
cols: 4
data: [ 0., 0., 1., 0., -1., 0., 0., 0., 0., -1., 0., 0. ]
"bicocca_calib_pose.yaml"
%YAML:1.0
---
camera_name: bicocca_calib
rotation_matrix:
rows: 3
cols: 3
data: [ 9.9995243549346924e-01, -5.5742207914590836e-03,
-8.0054979771375656e-03, 5.5595920421183109e-03,
9.9998289346694946e-01, -1.8484065076336265e-03,
8.0156642943620682e-03, 1.8038111738860607e-03,
9.9996626377105713e-01 ]
translation_matrix:
rows: 3
cols: 1
data: [ -1.8084248900413513e-01, -6.0732420533895493e-03,
-4.4141253456473351e-03 ]
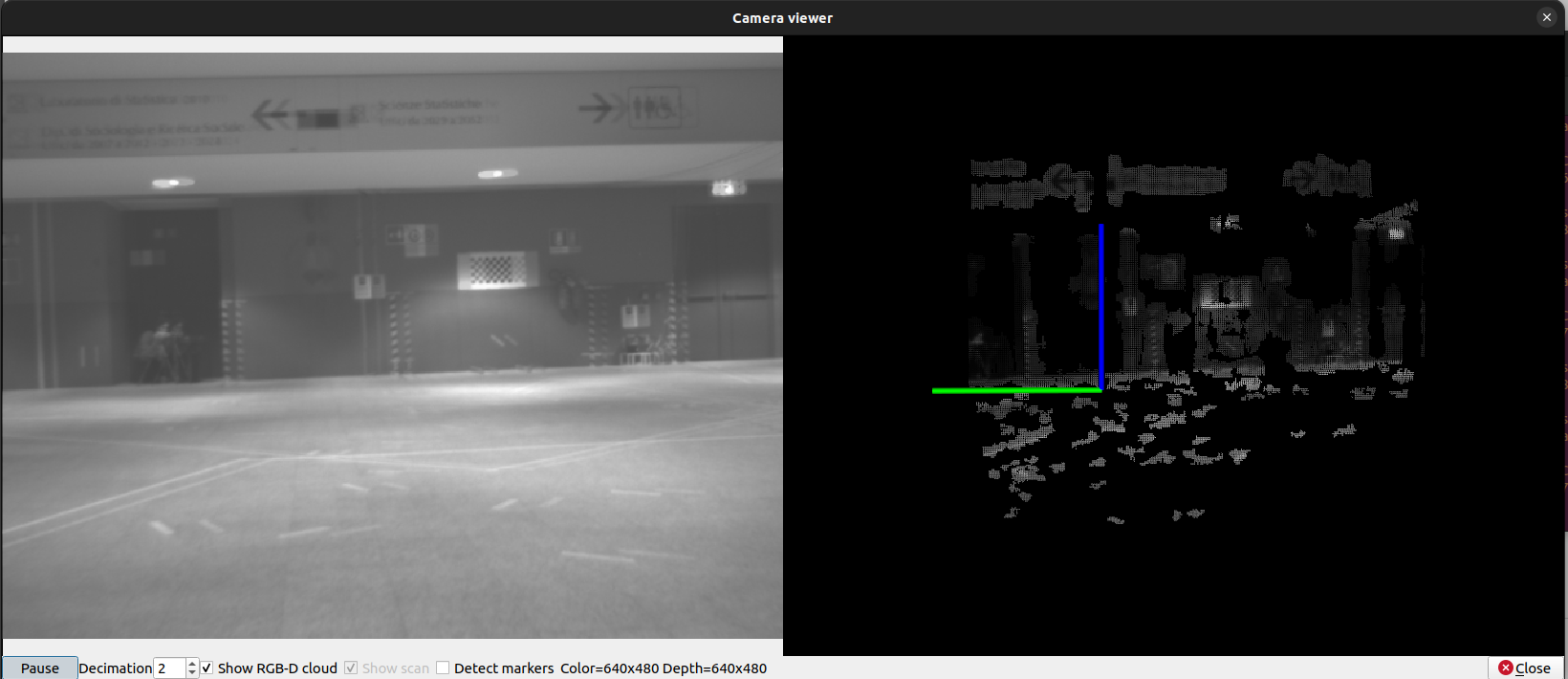
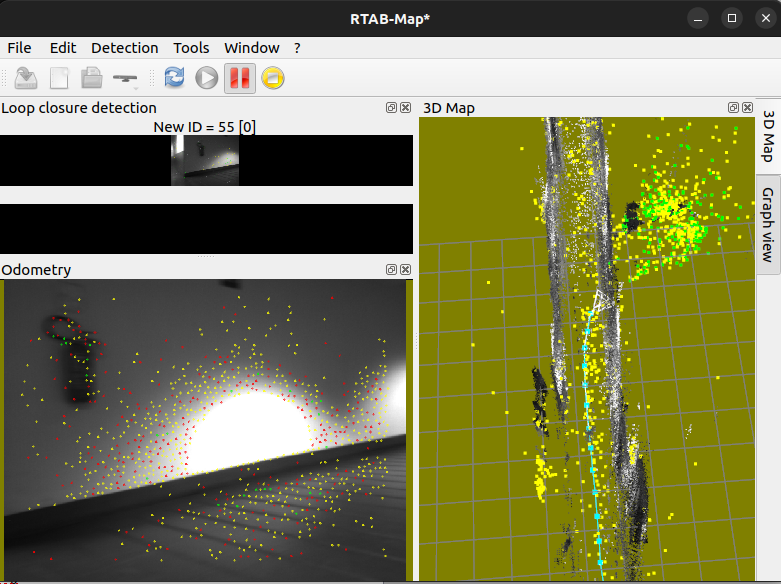
I had difficulty to find documentation about the format used for the calibration, so I guessed what meant the data inside the *.mat files. The stereo rectification looks ok:
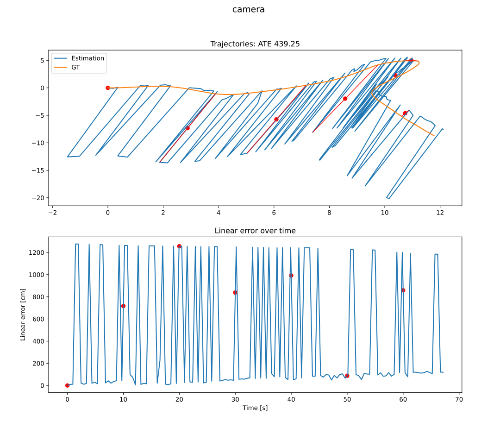
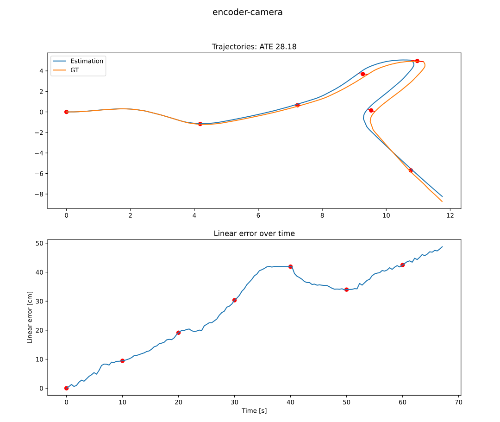
and the visual odometry...
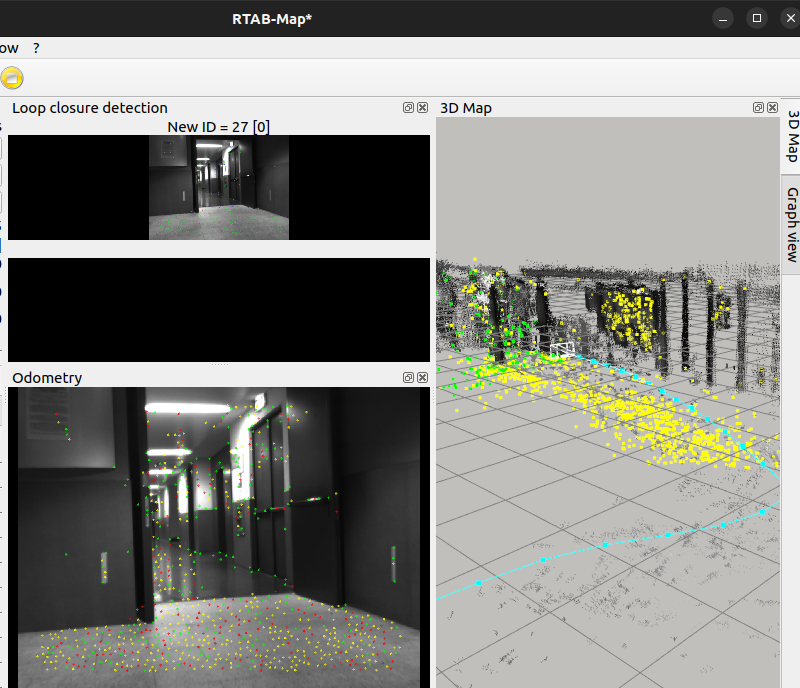
till the camera rotates in front of a textureless wall:
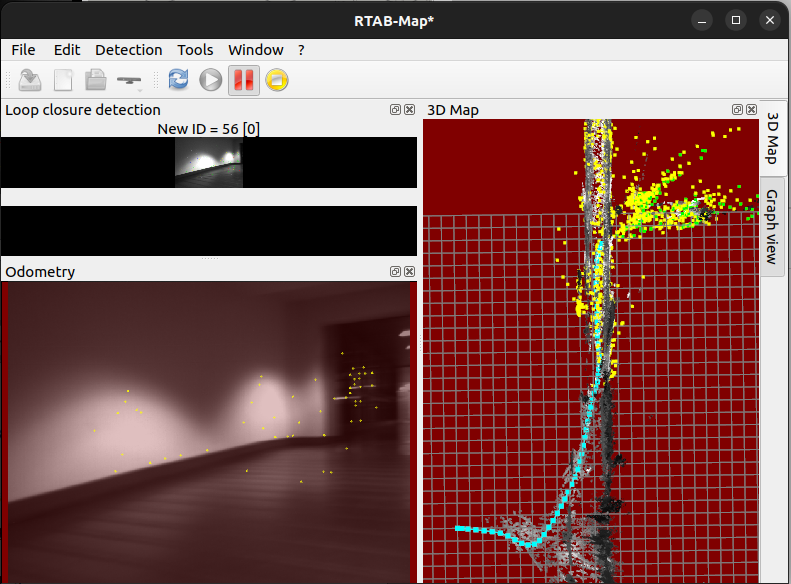
There is also noticeable motion blur at the same time, making visual odometry being lost. With rtabmap_ros, one thing that can be done to recover from this is, if there is also wheel odometry, set guess_frame_id to wheel odometry TF, set publish_null_when_lost to false (to avoid triggering new map) and set Odom/ResetCountdown > 0. That way, visual odometry can be reset after a couple of frames being lost, then restart accordingly to wheel odometry motion while vo was lost, while not triggering a new session on rtabmap side.