Hello,
we have a robot which uses RTAB-Map on ROS. On top of the mobile robot is a 3D Lidar (Velodyne) mounted which we use for mapping with RTAB-Map by specifying the argument
<arg name="scan_cloud_topic" default="/velodyne_points"/>
in the launch file. When the points of the point cloud are described in the coordinate frame of the velodyne sensor, RTAB-Map works well and builds a map correct while moving the robot around.
However, when the points of the pointcloud are transformed in the odom frame, RTAB-Map does not work correctly anymore. It seems like RTAB-Map does not add information to the grid map after leaving the area specified by
Grid/RangeMax: 10 (10m) away from the odom frame origin.
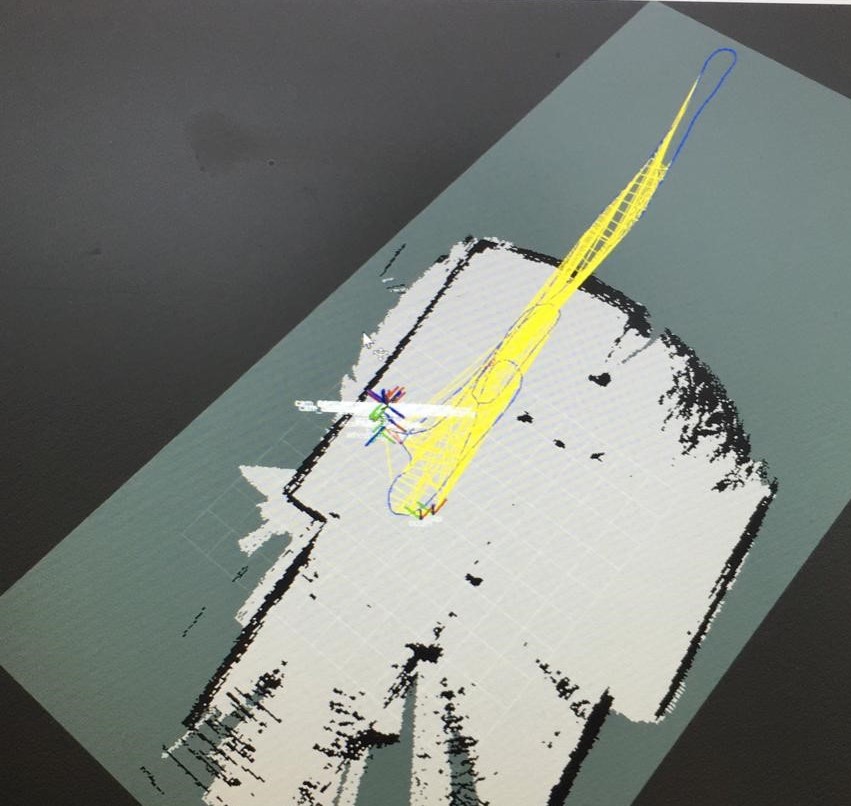
Here is an example shown in Rviz: Although the robot moved around in the room, as visualized by Map-Graph (blue line), RTAB-Map generates new nodes but does not add information to the grid map.
We checked that the point cloud was transformed correctly to odom frame and in the header the frame is set to odom.
Is it possible to use a point cloud that is not described in the sensor frame?
Thanks a lot for your help!

