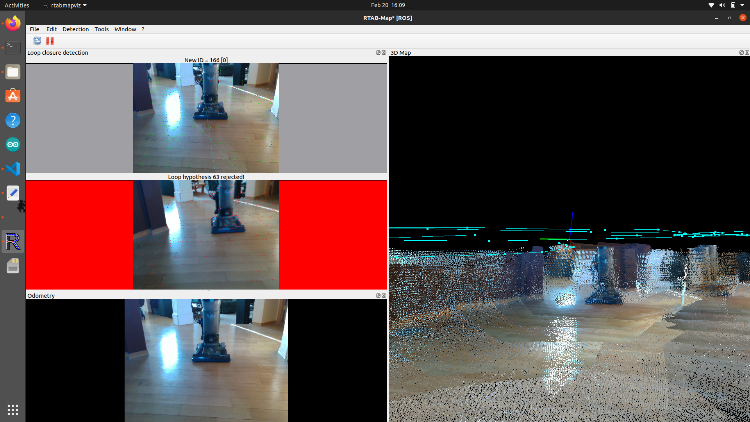
I am trying to set force3dof true but I am seeing contradicting evidence that it is and isn't being set. in the first picture the graph has a changing z. If i don't deviate from the default rtabmap.launch file and dont't set any params everything works but i just thought i could improve performance if i could adjust params. Im using a d435i and t265.
i followed
this tutorial. I cant find the config.ini file you reference on ubuntu 20
this is my launch file.
<include file="$(find realsense2_camera)/launch/rs_d400_and_t265.launch" />
<include file="$(find rtabmap_ros)/launch/rtabmap.launch" >
<arg name="odom_topic" value="/t265/odom/sample"/>
<arg name="frame_id" value="t265_link"/>
<arg name="rgbd_sync" value="true"/>
<arg name="depth_topic" value="/d400/aligned_depth_to_color/image_raw"/>
<arg name="rgb_topic" value="/d400/color/image_raw"/>
<arg name="camera_info_topic" value="/d400/color/camera_info"/>
<arg name="approx_rgbd_sync" value="true"/>
<arg name="visual_odometry" value="false"/> <!--i get errors when set to true-->
<arg name="localization" value="false"/>
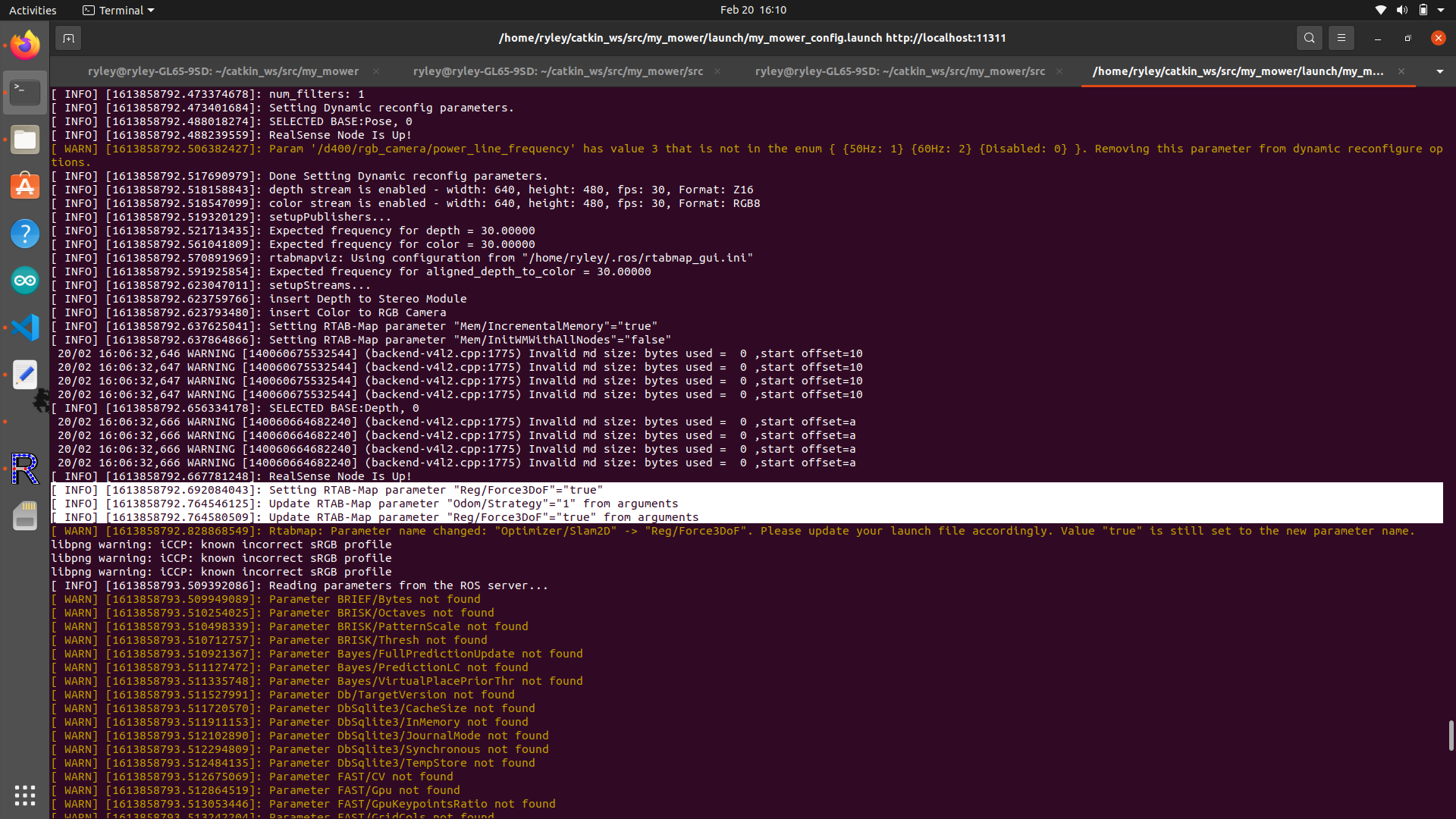
<arg name="rtabmap_args" default="--Odom/Strategy 1 --Reg/Force3DoF true"/>
i also added this from the tutorial to the rtabmap.launch file
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry">
<param name="Reg/Force3DoF" value="true" />
</node>
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
<param name="Reg/Force3DoF" value="true" />
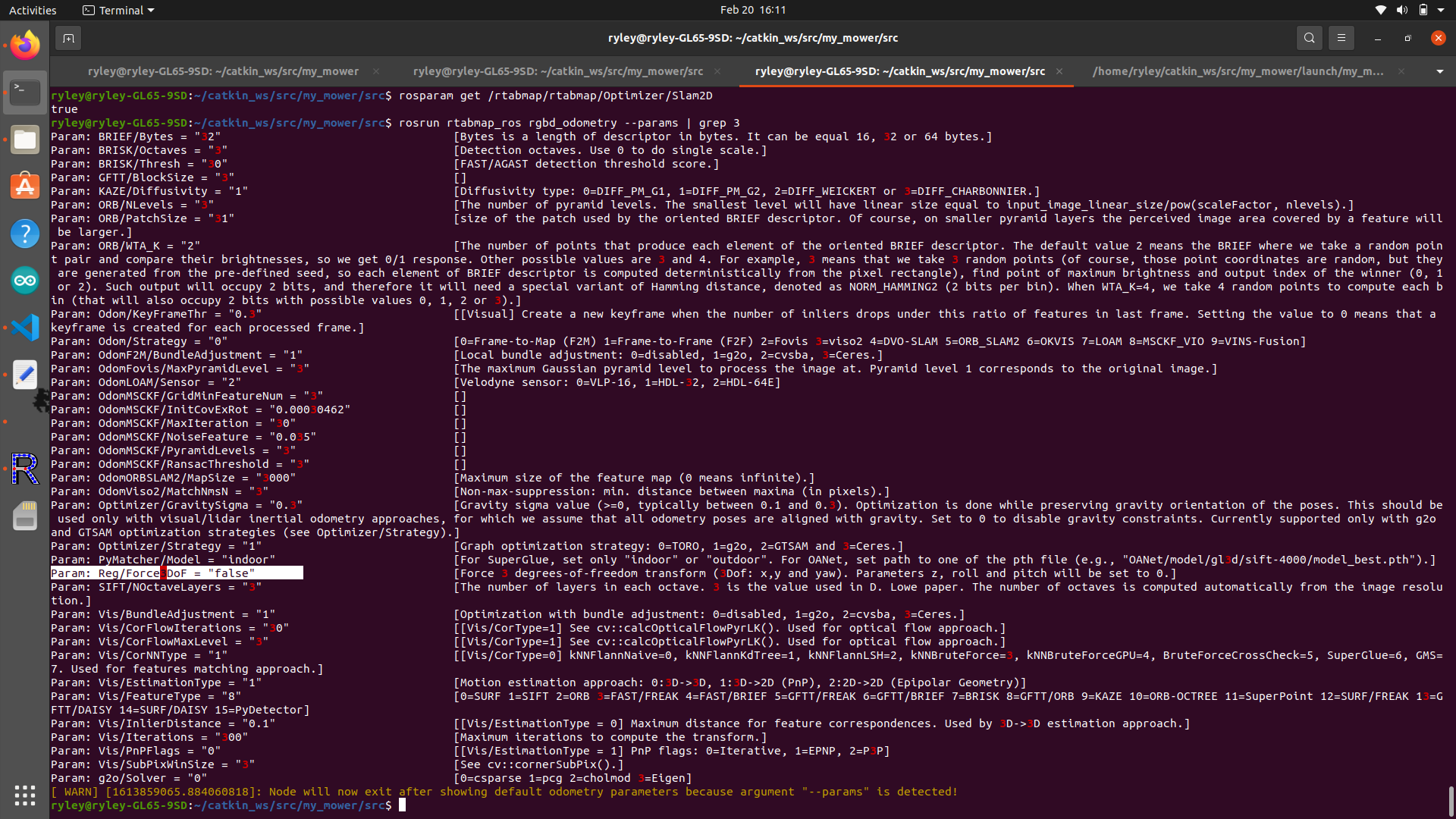
<param name="Optimizer/Slam2D" value="true" />
</node>