Hi,
I'm trying to use RTAB-Map with a turtlebot2 which is controlled remotely from a workstation. I followed already the ros tutorials to set up the network configuration on both the Turtlebot2 notebook and on my workstation. I already tested if I can see, from my workstation, images taken by the turtlebot2. I used from my workstation:
rosrun image_view image_view image:=/camera/depth/image_rect
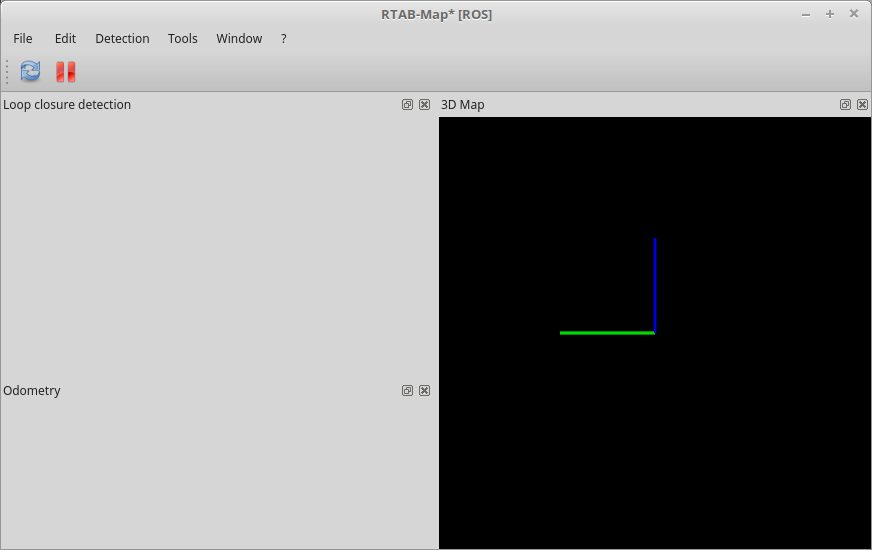
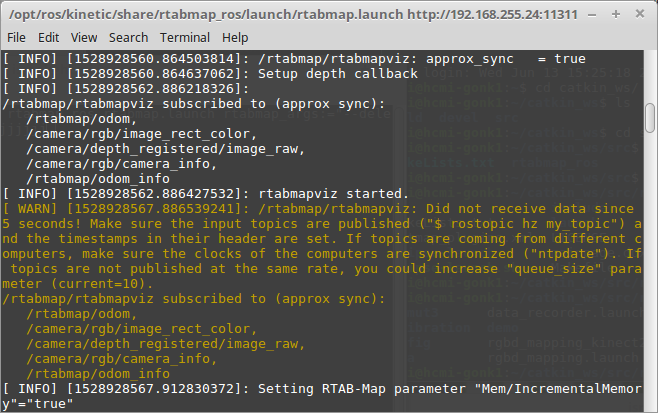
It works well. I have installed RTAB-MAP in both the turtlebot2 and the workstation. When I run RTAB_MAP directly from the turtlebot2 notebook, it works well. However, when I ssh into the turtlebot from the workstation and try to run RTAB-MAP just shows a black screen and the terminal shows the folloing errors.