Hi Sean,
sorry for the delay, I was quite busy this winter. I've been playing with your without_memory_management.db:
rtabmap-reprocess |
--Icp/OutlierRatio 0.85 \
--Icp/VoxelSize 0.05 \
--RGBD/NeighborLinkRefining false -\
-Kp/DetectorStrategy 8 \
--Vis/FeatureType 8 \
--RGBD/LocalBundleOnLoopClosure false \
--RGBD/OptimizeMaxError 3 \
--Icp/MaxCorrespondenceDistance 0.3 \
--Icp/CorrespondenceRatio 0.3 \
--Mem/STMSize 30 \
without_memory_management.db \
output.db
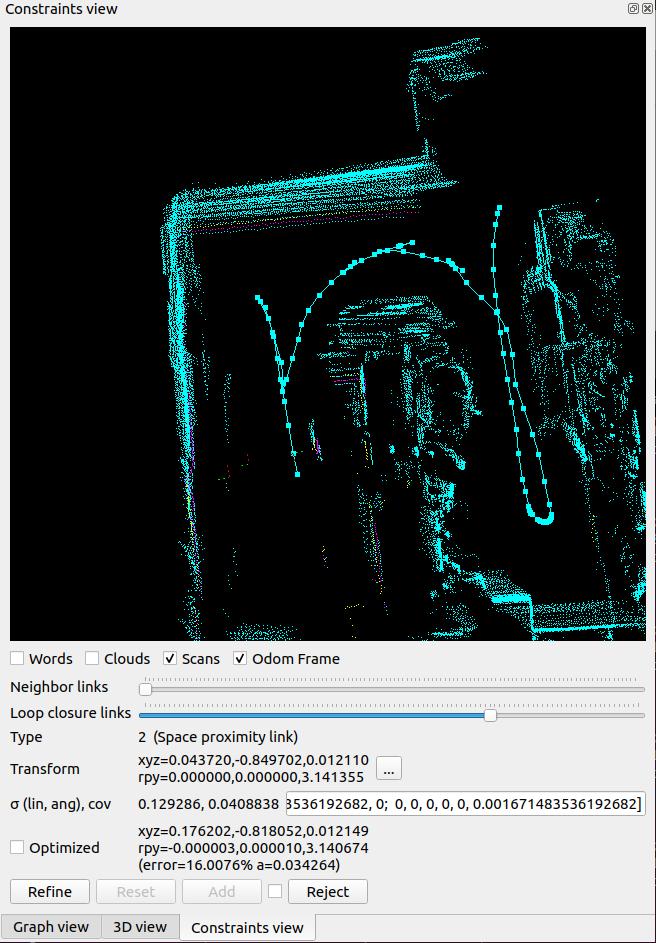
This output.db was more cleaner to test why RGBD/OptimizeMaxError is not working properly on your map. I've found that your odometry poses have non-null Z values, while using 2D lidar and Reg/Force3DoF=true. It seems that the optimizer doesn't like having poses with Z values and 3DoF contraints in 2D mode, making RGBD/OptimizeMaxError check failing. For example, I tried to merge manually the two sessions but even if the images were taken at the same place (the end of session 1 and beggining of session 2), there was a Z offset of 40 cm! Here the two poses (taken from exported odometry
poses_odom.txt):
1455216201.124591 8.288856 -2.205386 -0.903682 0.000000 0.000000 0.035750 0.999361
1455208280.178878 -0.100181 0.002711 -0.545289 0.000000 0.000000 -0.013912 0.999903
However, with Reg/Force3DoF turned off, loop and optimizations seem working with RGBD/OptimizeMaxError:
rtabmap-reprocess |
--Icp/OutlierRatio 0.85 \
--Icp/VoxelSize 0.05 \
--RGBD/NeighborLinkRefining false -\
--Kp/DetectorStrategy 8 \
--Vis/FeatureType 8 \
--RGBD/LocalBundleOnLoopClosure false \
--RGBD/OptimizeMaxError 3 \
--Icp/MaxCorrespondenceDistance 0.3 \
--Icp/CorrespondenceRatio 0.3 \
--Mem/STMSize 30 \
--Reg/Force3DoF false \
without_memory_management.db \
output.db
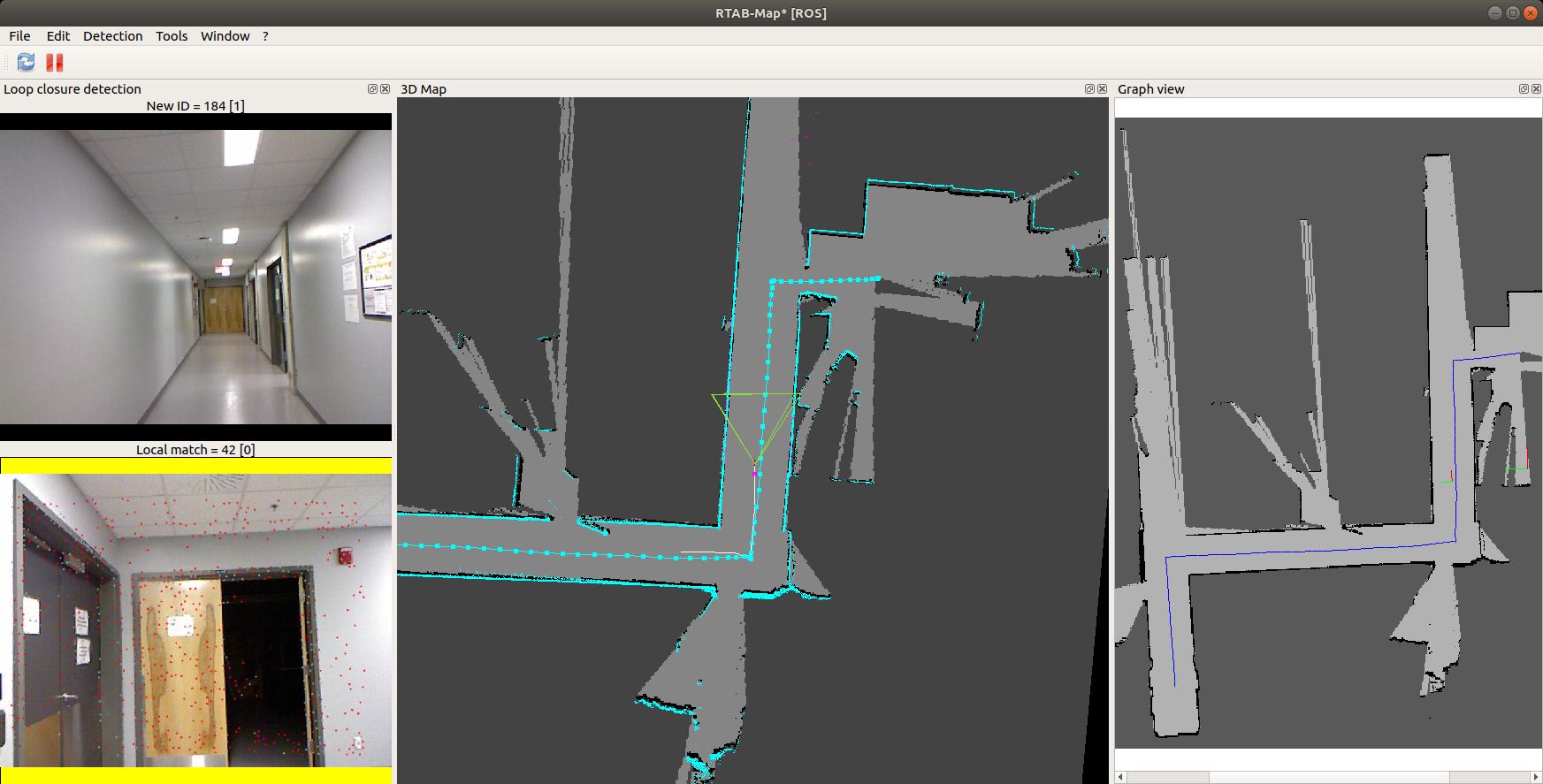
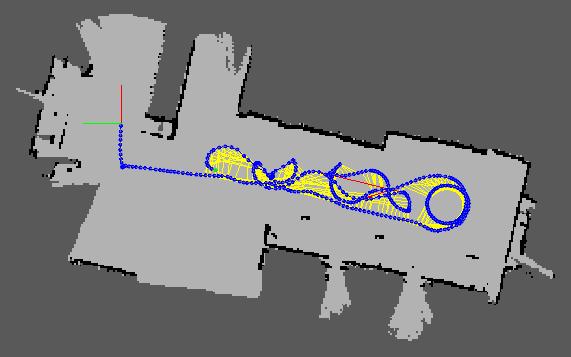
On your memory_management.db, with RGBD/NeighborLinkRefining=false as above, proximity detections are not very accurate as assembled scans seem to contain odom drift:
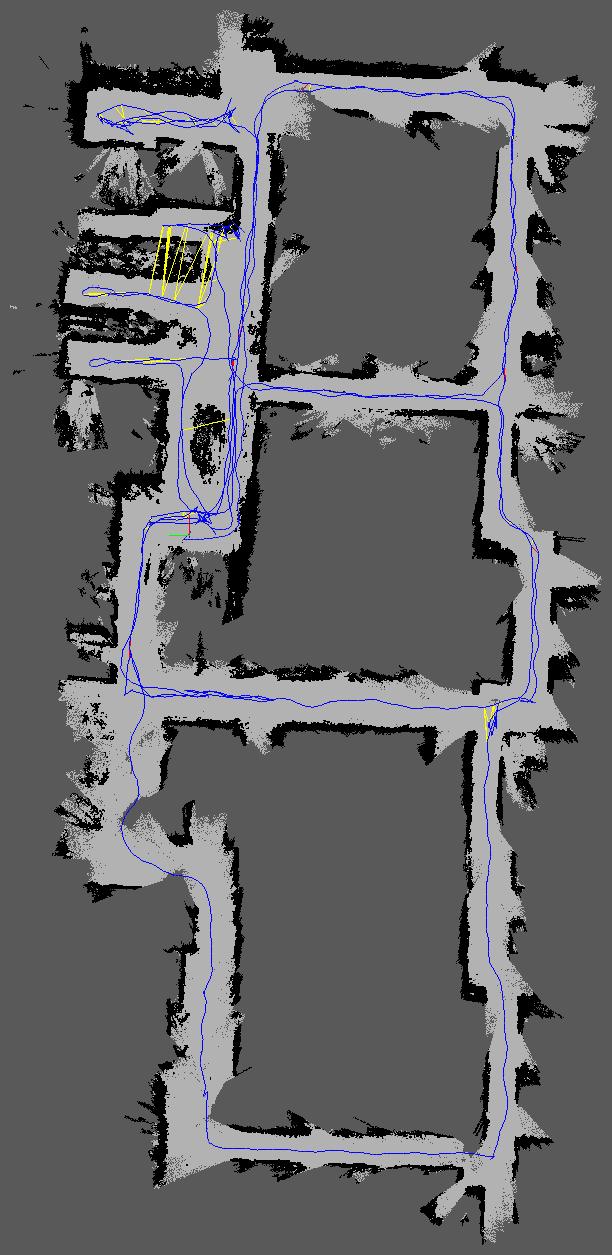
If I set RGBD/NeighborLinkRefining=true to correct odometry drift, the blue points are more superposed, however the whole global map is deformed:
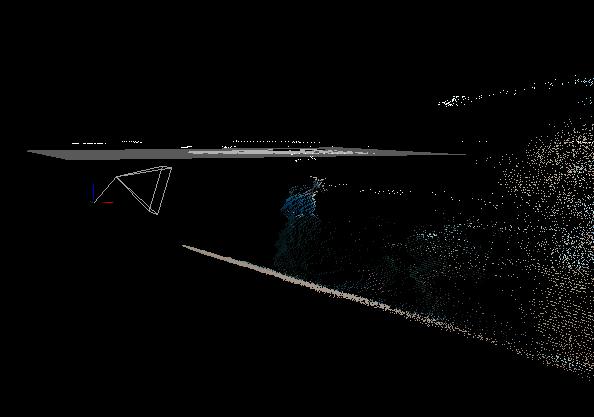
Here is without any loop closure, proximity detection or neighbor refining (pure odom):

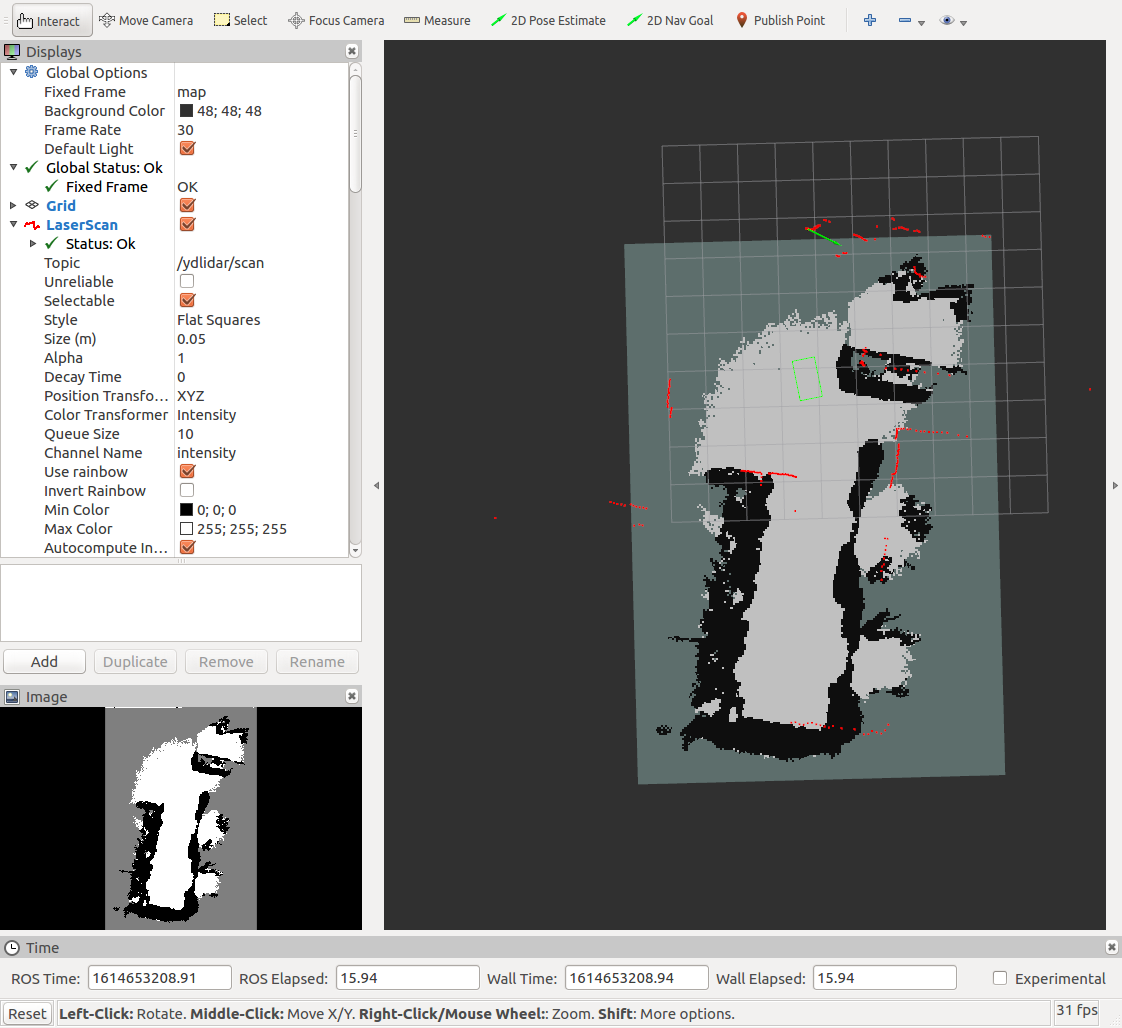
My feeling is that the lidar attitude (roll/pitch) is not always null. Does your lidar rotate in pitch and roll when moving? Also, there are some Z values changing as observed in previous database. Here is if I remove any lidar in pose optimization and loop closures:
rtabmap-reprocess \
--Icp/OutlierRatio 0.85 \
--Icp/VoxelSize 0.05 \
--RGBD/NeighborLinkRefining false \
--Kp/DetectorStrategy 8 \
--Vis/FeatureType 8 \
--RGBD/LocalBundleOnLoopClosure false \
--RGBD/OptimizeMaxError 3 \
--Icp/MaxCorrespondenceDistance 0.3 \
--Icp/CorrespondenceRatio 0.3 \
--Mem/STMSize 30 \
--Reg/Force3DoF false \
--RGBD/ProximityByTime false \
--Icp/PMConfig "" \
--RGBD/ProximityPathMaxNeighbors 0 \
--Reg/Strategy 0 \
memory_management.db \
output.db
Odom (without graph optimization):

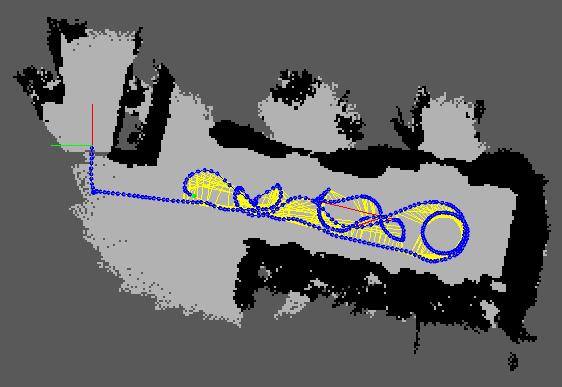
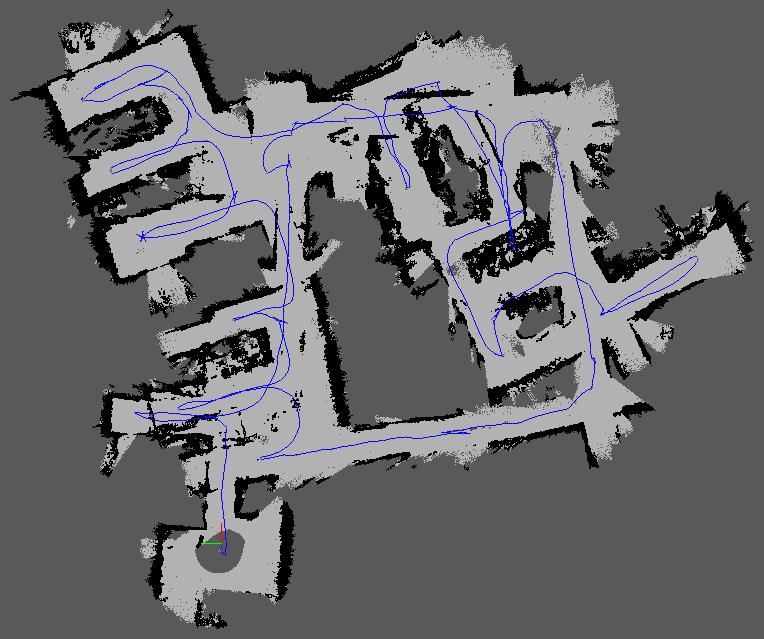
With graph optimization:

Now the optimized map seems more accurate than the odometry one (e.g., removing the doublewall at the bottom left).