Trying to achieve multiple turtlebot3 where each robot generates a map with rtab-map

Trying to achieve multiple turtlebot3 where each robot generates a map with rtab-map

|
Hello,
I am relatively new to ROS and what I am trying to achieve as final goal is a system where I have multiple turtlebot3 that map a 3D world. I am trying with RTAB-MAP but unsuccessfully for now. My launch file is the following:
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="first_tb3" default="tb3_0"/>
<arg name="second_tb3" default="tb3_1"/>
<arg name="known_initial_pos" default="true"/>
<arg name="first_tb3_x_pos" default="-10"/> <!-- Defaul -7.0-->
<arg name="first_tb3_y_pos" default=" -2"/> <!-- Default -1.0-->
<arg name="second_tb3_x_pos" default=" 4.0"/> <!-- Default 7.0-->
<arg name="second_tb3_y_pos" default=" 2.0"/> <!-- Default -1.0-->
<!-- Run the map expansion node -->
<node pkg="multi_robot_exploration" type="map_node" name="multi_robot_exploration_map_node"/>
<!-- Open two tb in gazebo and give spawn positions -->
<include file="$(find multi_robot_exploration)/launch/spawn_robots.launch">
<arg name="first_tb3_x_pos" value="$(arg first_tb3_x_pos)"/>
<arg name="first_tb3_y_pos" value="$(arg first_tb3_y_pos)"/>
<arg name="second_tb3_x_pos" value="$(arg second_tb3_x_pos)"/>
<arg name="second_tb3_y_pos" value="$(arg second_tb3_y_pos)"/>
</include>
<!-- Open slam for each robot in their ns -->
<include file = "$(find multi_robot_exploration)/launch/slam_online_synch.launch">
<arg name="ns" value="$(arg first_tb3)"/>
</include>
<include file = "$(find multi_robot_exploration)/launch/slam_online_synch.launch">
<arg name="ns" value="$(arg second_tb3)"/>
</include>
<!-- Merge the two robot maps -->
<include file="$(find multi_robot_exploration)/launch/multi_robot_map_merge.launch">
<arg name="known_initial_pos" value="$(arg known_initial_pos)"/>
</include>
<!-- Open rviz for two robots -->
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find multi_robot_exploration)/config/two_tb.rviz"/>
</launch>and spawn_robots.launch is: <launch>
<!-- Initial position for the first turtlebot -->
<arg name="first_tb3_x_pos" default="-7.0"/> <!-- Between -7.0 and 7.0 ???-->
<arg name="first_tb3_y_pos" default=" -1.0"/> <!-- Between -7.0 and 7.0 ???-->
<!-- Initial position for the second turtlebot -->
<arg name="second_tb3_x_pos" default=" 7.0"/> <!-- Between -7.0 and 7.0 ???-->
<arg name="second_tb3_y_pos" default=" -1.0"/> <!-- Between -7.0 and 7.0 ???-->
<!-- Combine the inital positions into one argument for spawning -->
<arg name="init_pose_0" default="-x $(arg first_tb3_x_pos) -y $(arg first_tb3_y_pos) -z 0.0" />
<arg name="init_pose_1" default="-x $(arg second_tb3_x_pos) -y $(arg second_tb3_y_pos) -z 0.0" />
<!-- Open the AWS bookstore gazebo world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<!-- <arg name="world_name" value="$(find multi_robot_exploration)/worlds/bookstore.world"/> -->
<!-- <arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/empty.world" /> -->
<arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/turtlebot3_world.world" />
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<!-- Spawn tb3_0 and start it's robot descirption / robot state publisher -->
<group ns="tb3_0">
<param name="tf_prefix" value="tb3_0" />
<include file="$(find multi_robot_exploration)/launch/tb3_0.launch" >
<arg name="init_pose" value="$(arg init_pose_0)"/>
<arg name="robot_name" value="tb3_0" />
<arg name="model" default="$(env TURTLEBOT3_MODEL)" />
</include>
<arg name="database_path" default="~/.ros/rtabmap.db" />
<node name="rtabmap" pkg="rtabmap_slam" type="rtabmap" output="screen">
<param name="databse_path" type="string" value="$(arg database_path)" />
<param name="frame_id" type="string" value="tb3_0/base_link" />
<param name="odom_frame_id" type="string" value="odom" />
<param name="subscribe_depth" type="bool" value="true" />
<param name="subscribe_laserScan" type="bool" value="false" />
<remap from="rgb/image" to="camera/rgb/image_raw" />
<remap from="depth/image" to="camera/depth/image_raw" />
<remap from="rgb/camera_info" to="camera/rgb/camera_info" />
<remap from="grid_map" to="map" />
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<param name="Kp/MaxDepth" type="string" value="4.0"/>
<param name="Reg/Strategy" type="string" value="2"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Vis/InlierDistance" type="string" value="0.1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.30"/>
</node>
</group>
<!-- Spawn tb3_1 and start it's robot descirption / robot state publisher -->
<group ns="tb3_1">
<param name="tf_prefix" value="tb3_1" />
<include file="$(find multi_robot_exploration)/launch/tb3_1.launch" >
<arg name="init_pose" value="$(arg init_pose_1)"/>
<arg name="robot_name" value="tb3_1" />
<arg name="model" default="$(env TURTLEBOT3_MODEL)" />
</include>
</group>
</launch>The error I see is [ WARN] [1719348537.260067020, 61.759000000]: Could not get transform from tb3_0/base_link to base_footprint after 0.200000 seconds (for stamp=61.298000)! Error="canTransform: source_frame base_footprint does not exist.. canTransform returned after 0.2 timeout was 0.2.". I don't knwo what I am doint wrong, hope you can help me. Thank you! |
|
Administrator
|
Do you have also a rtabmap node for tb3_1? Not sure who is asking for base_footprint. Is odometry publishing from odom to base_footprint?
Otherwise, you may want to set a differnt database name for each robot. You also need to set a different map_frame_id for each robot. The "odom" frame you are using would need to be unique for each robot, like "tb3_0/odom" and "tb3_1/odom" frames. <node name="rtabmap" pkg="rtabmap_slam" type="rtabmap" output="screen"> <param name="databse_path" type="string" value="~/.ros/map_tb3_0.db" /> <param name="frame_id" type="string" value="tb3_0/base_link" /> <param name="odom_frame_id" type="string" value="tb3_0/odom" /> <param name="map_frame_id" type="string" value="tb3_0/map" /> ... </node> cheers, Mathieu |
Re: Trying to achieve multiple turtlebot3 where each robot generates a map with rtab-map
|
|
Thank you for your answer.
I tried to set a different db name for each robot, specifying a different map_Frame_id and odom but it doesn't work. The second database is not created and from RVIZ I don't see anything. This is the launch file:
<launch>
<!-- Initial position for the first turtlebot -->
<arg name="first_tb3_x_pos" default="-7.0"/> <!-- Between -7.0 and 7.0 ???-->
<arg name="first_tb3_y_pos" default=" -1.0"/> <!-- Between -7.0 and 7.0 ???-->
<!-- Initial position for the second turtlebot -->
<arg name="second_tb3_x_pos" default=" 7.0"/> <!-- Between -7.0 and 7.0 ???-->
<arg name="second_tb3_y_pos" default=" -1.0"/> <!-- Between -7.0 and 7.0 ???-->
<!-- Combine the inital positions into one argument for spawning -->
<arg name="init_pose_0" default="-x $(arg first_tb3_x_pos) -y $(arg first_tb3_y_pos) -z 0.0" />
<arg name="init_pose_1" default="-x $(arg second_tb3_x_pos) -y $(arg second_tb3_y_pos) -z 0.0" />
<!-- Open the AWS bookstore gazebo world -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find multi_robot_exploration)/worlds/trying3.world"/>
<!-- <arg name="world_name" value="$(find multi_robot_exploration)/worlds/bookstore.world"/> -->
<!-- <arg name="world_name" value="$(find turtlebot3_gazebo)/worlds/empty.world" /> -->
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<!-- Spawn tb3_0 and start it's robot descirption / robot state publisher -->
<group ns="tb3_0">
<param name="tf_prefix" value="tb3_0" />
<include file="$(find multi_robot_exploration)/launch/tb3_0.launch" >
<arg name="init_pose" value="$(arg init_pose_0)"/>
<arg name="robot_name" value="tb3_0" />
<arg name="model" default="$(env TURTLEBOT3_MODEL)" />
</include>
<!-- <arg name="database_path" default="~/.ros/rtabmap.db" /> -->
<node name="rtabmap" pkg="rtabmap_slam" type="rtabmap" output="screen">
<param name="databse_path" type="string" value="~/.ros/rtabmap.db" />
<param name="frame_id" type="string" value="tb3_0/base_link" />
<param name="odom_frame_id" type="string" value="tb3_0/odom" />
<param name="map_frame_id" type="string" value="tb3_0/map" />
<param name="subscribe_depth" type="bool" value="true" />
<param name="subscribe_laserScan" type="bool" value="false" />
<remap from="rgb/image" to="camera/rgb/image_raw" />
<remap from="depth/image" to="camera/depth/image_raw" />
<remap from="rgb/camera_info" to="camera/rgb/camera_info" />
<!-- <remap from="grid_map" to="gridgrid_map" /> -->
<remap from="grid_map" to="map" />
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<param name="Kp/MaxDepth" type="string" value="4.0"/>
<param name="Reg/Strategy" type="string" value="2"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Vis/InlierDistance" type="string" value="0.1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.30"/>
</node>
</group>
<!-- Spawn tb3_1 and start it's robot descirption / robot state publisher -->
<group ns="tb3_1">
<param name="tf_prefix" value="tb3_1" />
<include file="$(find multi_robot_exploration)/launch/tb3_1.launch" >
<arg name="init_pose" value="$(arg init_pose_1)"/>
<arg name="robot_name" value="tb3_1" />
<arg name="model" default="$(env TURTLEBOT3_MODEL)" />
</include>
<!-- <arg name="database_path" default="~/.ros/rtabmap2.db" /> -->
<node name="rtabmap" pkg="rtabmap_slam" type="rtabmap" output="screen">
<param name="databse_path" type="string" value="~/.ros/rtabmap2.db" />
<param name="frame_id" type="string" value="tb3_1/base_link" />
<param name="odom_frame_id" type="string" value="tb3_1/odom" />
<param name="map_frame_id" type="string" value="tb3_1/map" />
<param name="subscribe_depth" type="bool" value="true" />
<param name="subscribe_laserScan" type="bool" value="false" />
<remap from="rgb/image" to="camera/rgb/image_raw" />
<remap from="depth/image" to="camera/depth/image_raw" />
<remap from="rgb/camera_info" to="camera/rgb/camera_info" />
<remap from="grid_map" to="map" />
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/>
<param name="Kp/MaxDepth" type="string" value="4.0"/>
<param name="Reg/Strategy" type="string" value="2"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>
<param name="Vis/MinInliers" type="string" value="5"/>
<param name="Vis/InlierDistance" type="string" value="0.1"/>
<param name="RGBD/AngularUpdate" type="string" value="0.1"/>
<param name="RGBD/LinearUpdate" type="string" value="0.1"/>
<param name="Rtabmap/TimeThr" type="string" value="700"/>
<param name="Mem/RehearsalSimilarity" type="string" value="0.30"/>
</node>
</group>
</launch>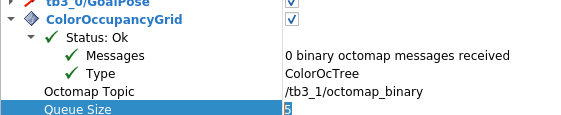 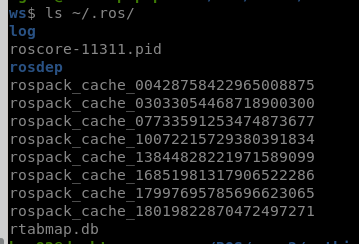 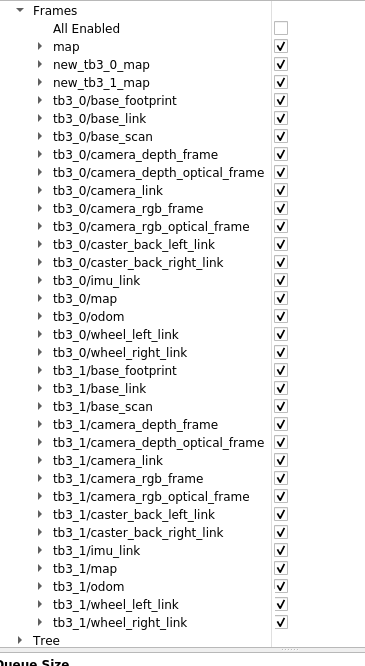 If you want I can share the project with you so that you can see better what is happening and what I can improve. Thank you! |
|
Administrator
|
Is the project on github? or is that only a launch file using default turtlebot3 stuff?
Not sure why the second database is not created. Are there warnings/errors in terminal? Is the node running? |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |