Using RTABMAP standalone app, performing a scan with the Realsense D455 camera and changing no settings gets us the following scan:

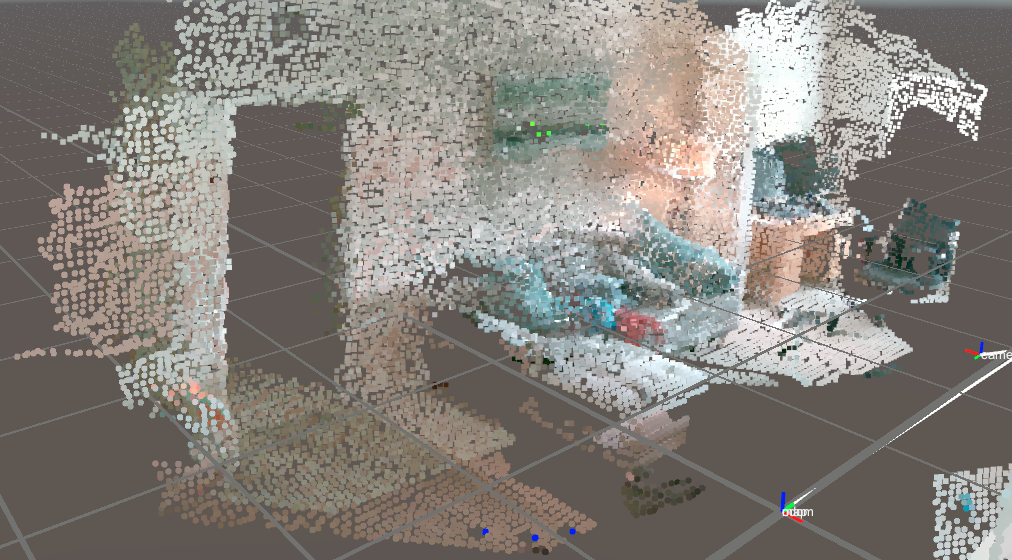
However, using the same camera and performing the same scan but launching the nodes ourselves and viewing them in unity gets us this scan (which is decent but seems quite a bit worse):
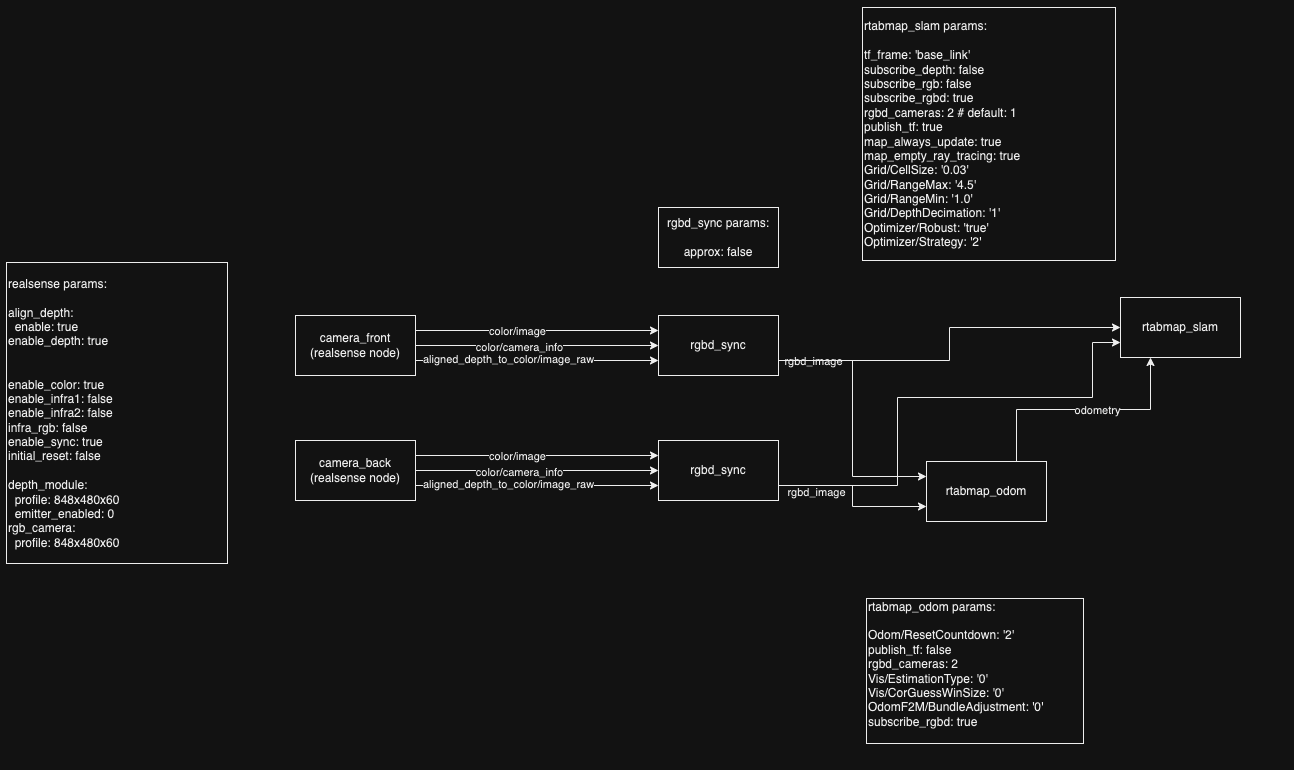
(this is using 1 camera with an rgbd odometry node with no changed params (besides the data source params) feeding odom into a slam node with no changed params (besides the data source params))
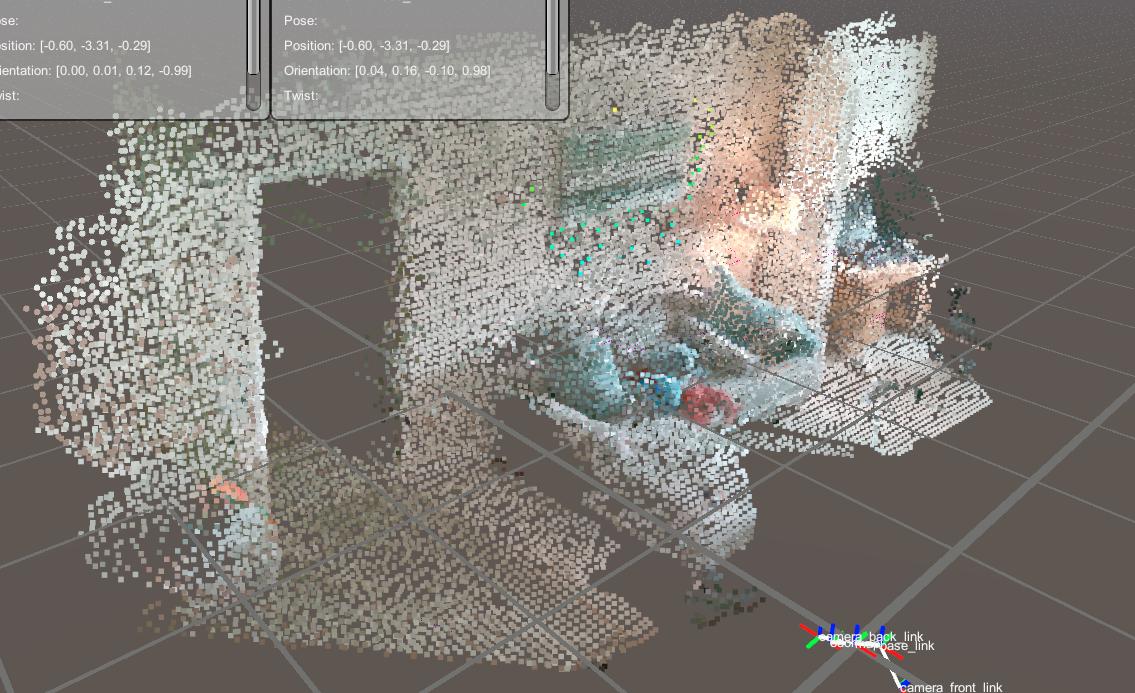
Then using 2 cameras for both odometry and slam gets us this result (which is still decent but worse than how it looks in the rtabmap standalone):
(the only changes for this are we launch 2 rgbdx_sync nodes to output 1 rgbd image and set the odom/slam nodes to subscribe to that)
I even double checked the preferences in the rtabmap standalone to make sure all the params match the defaults that im using. I built rtabmap with GTSAM and libpointmatcher.
My questions are:
Is our performance actually worse? or is this a function of the way its presented (e.g. color vs black and white or smaller dots making it look better than it is)?
Do you perform any noise reduction or any other post-processing in the standalone app?
What params would you suggest that i tweak?
So far, I have tried tweaking (to no avail):
RGBD/AngularUpdate = 0.01
RGBD/LinearUpdate = 0.01
RGBD/NeighborLinkRefining = true
RGBD/OptimizeFromGraphEnd = true
Grid/CellSize = 0.03-0.08
Grid/NoiseFilteringRadius = 0.5
Grid/NoiseFilteringMinNeighbors = 2
Grid/DepthDecimation = 1
map_always_update = true
map_empty_ray_tracing = true
Any advice you could offer to reduce the noise of the point cloud would be greatly appreciated! thanks :)
P.s.
I can also provide the launch files if need be, but I change no params that don't involve the data sources of rtabmap.