Hi,
I tested with simple turtlebot3 simulation with only 2D lidar. With lidar-only, we have to set "
--RGBD/ProximityMaxGraphDepth 0" so that proximity detections are detected between the new and old map (assuming that the robot was correctly localized in the previous map before). Here is an example (I tested on
ros2, but should also works on
ros1):
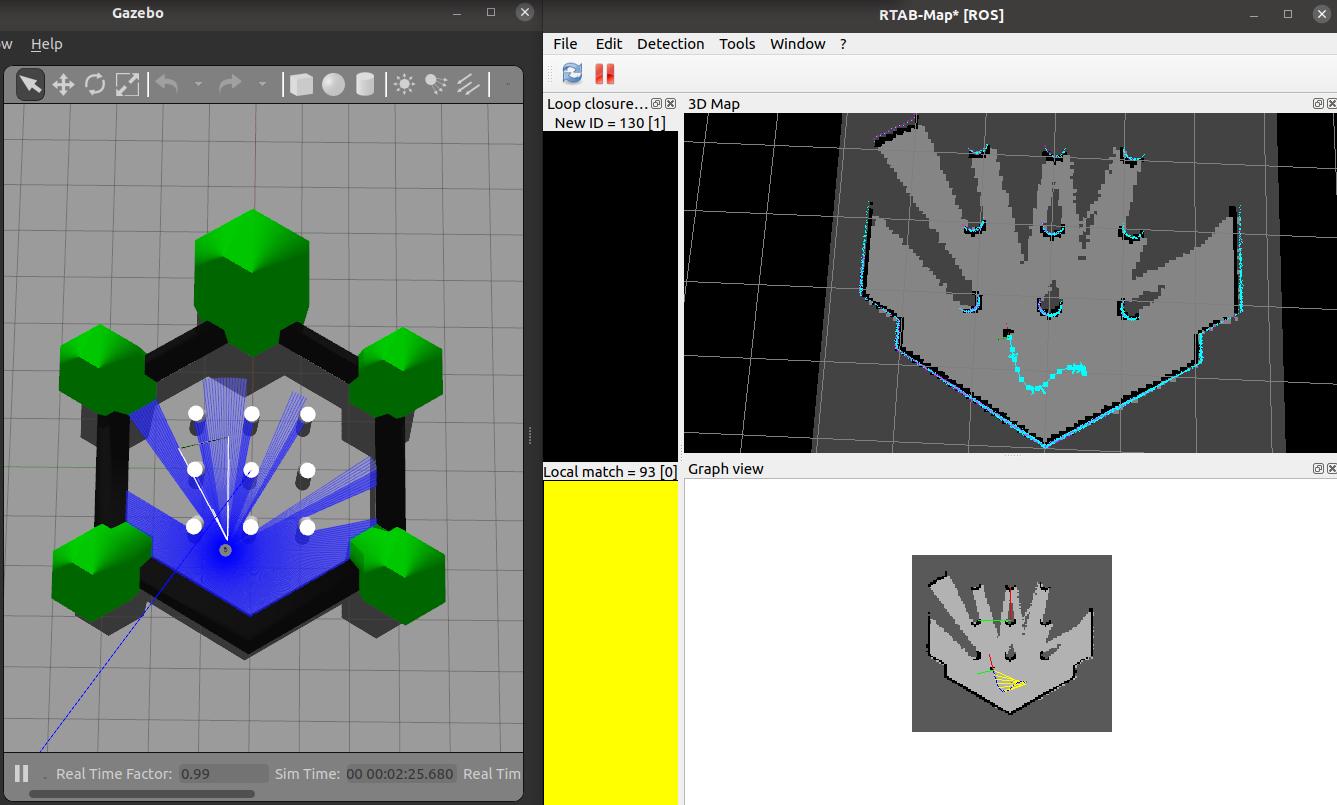
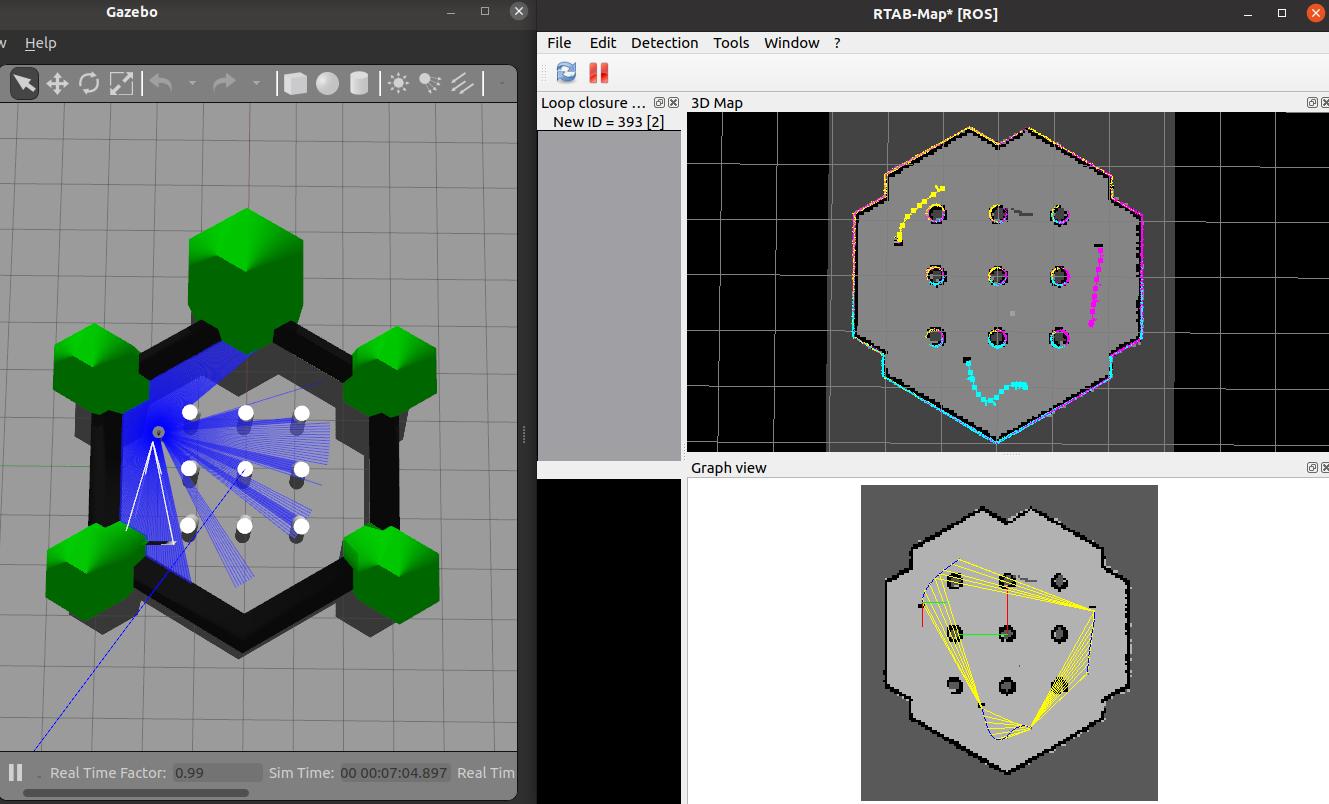
1) Mapping (until yellow links appear, meaning that we are localizing on our map):
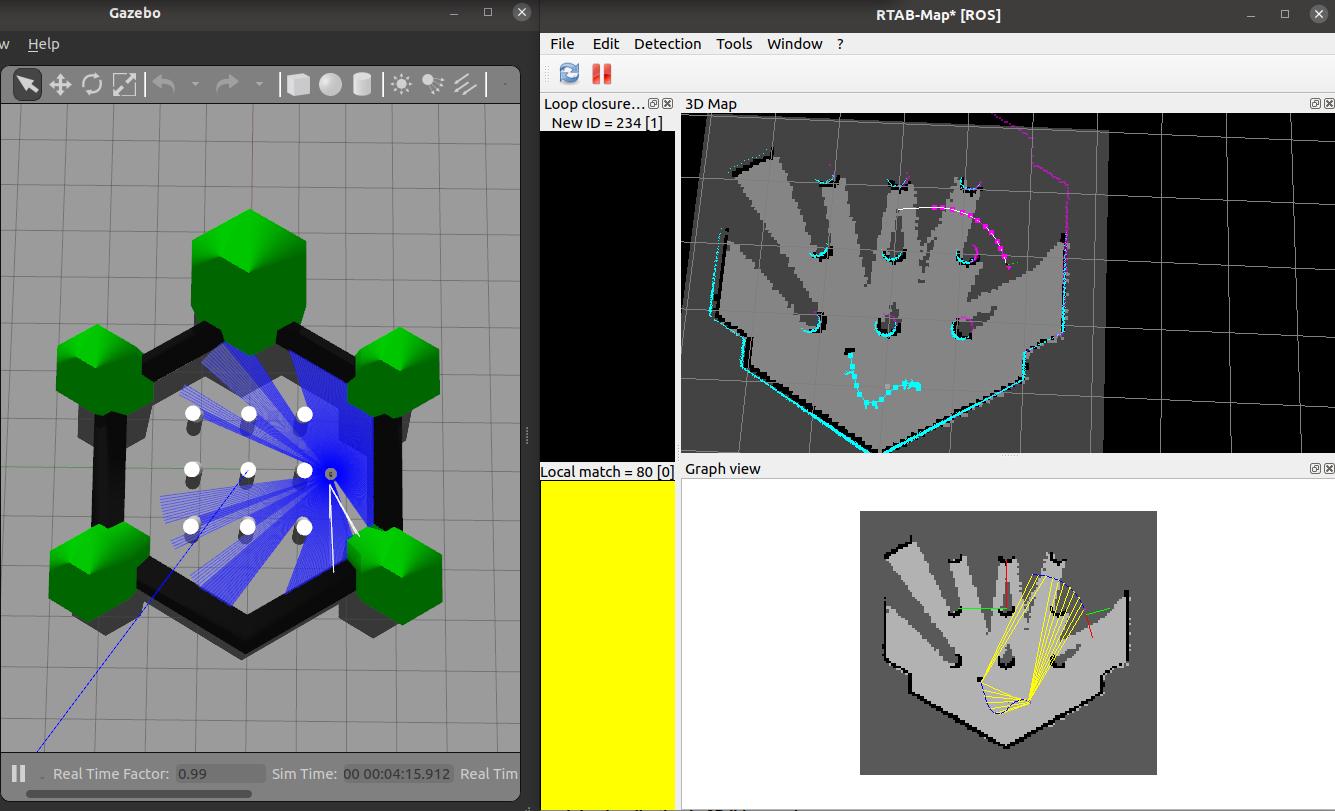
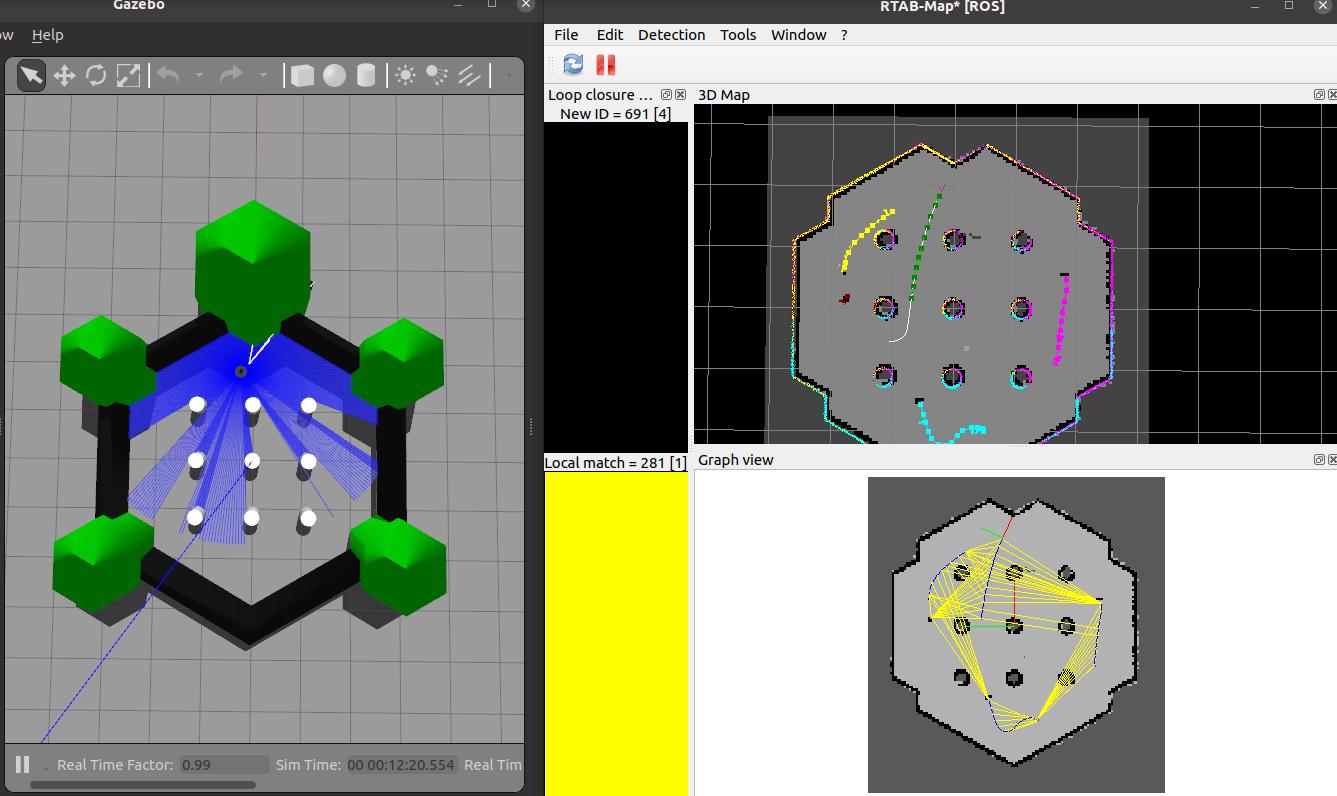
2) Switch to localization mode (using set_mode_localization service or in rtabmapviz Detection->Localization) then move around (we can see the map is not updated where we passed by on top right):
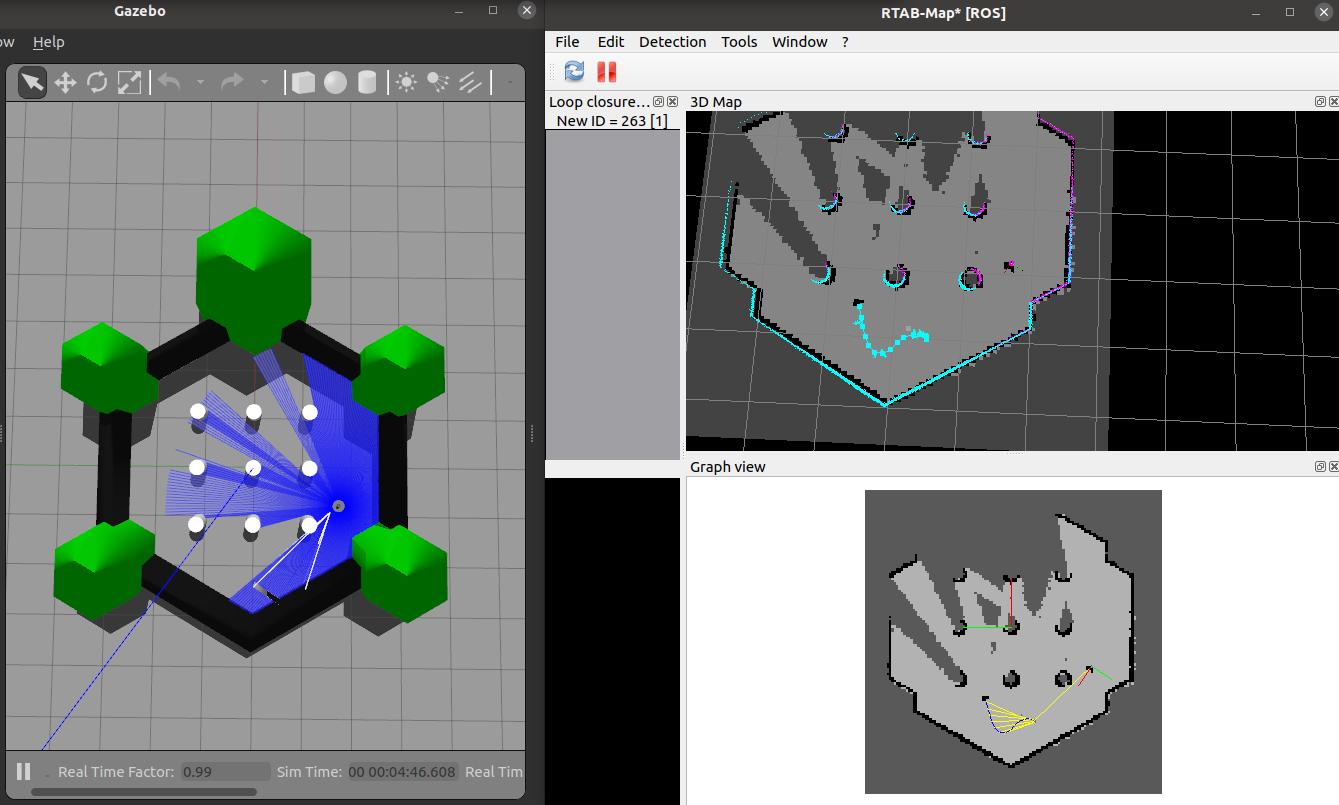
3) Switch to mapping mode (using set_mode_mapping service or in rtabmapviz Detection->Mapping) then map some the missing areas:
4) Switching again to localization mode:
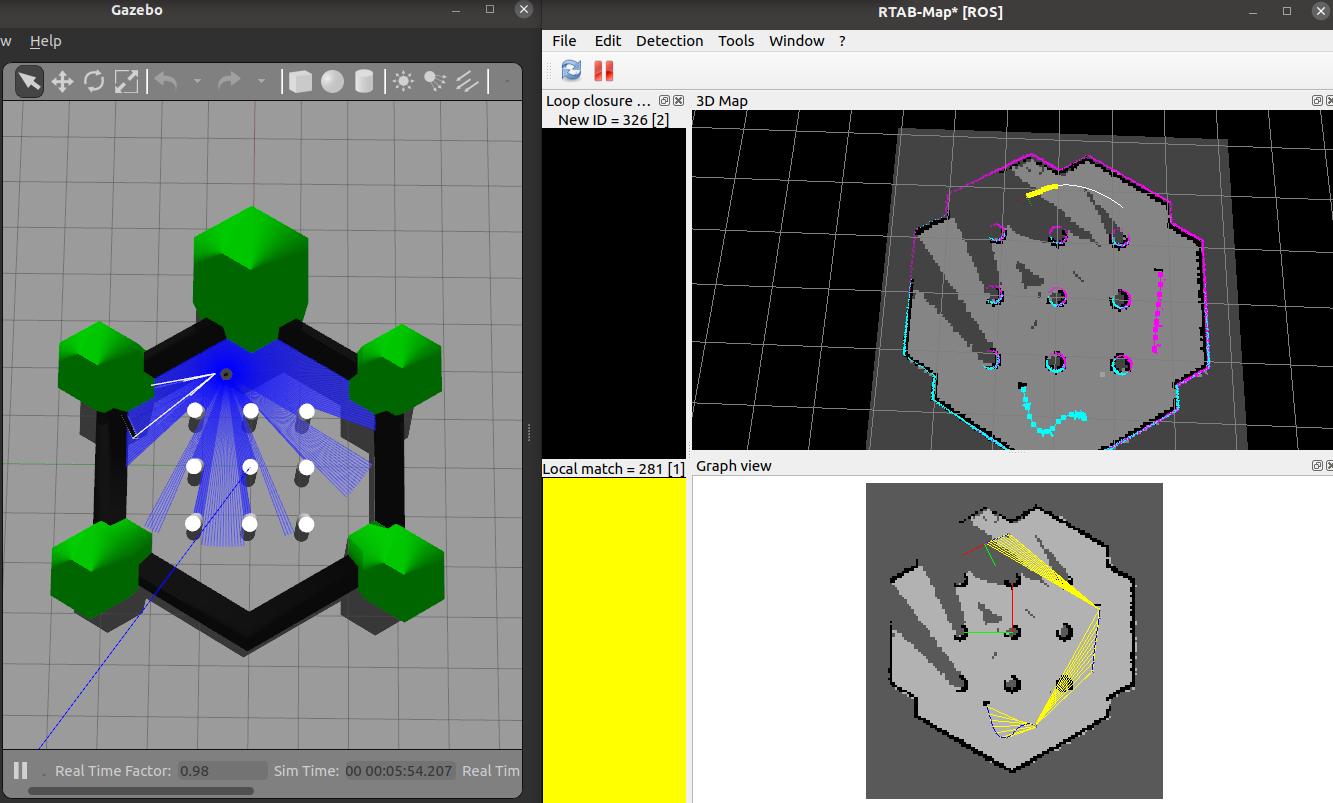
5) Switch to mapping the third time:
6) We now have three sessions linked together, switching to localization to more around:
cheers,
Mathieu

