Hi matlabbe
Firstly, i'd like to thank for your great contribution. But i have some question about this software.
I install the rtab-map with ros: $sudo apt-get install ros-kinetic-rtabmap-ros
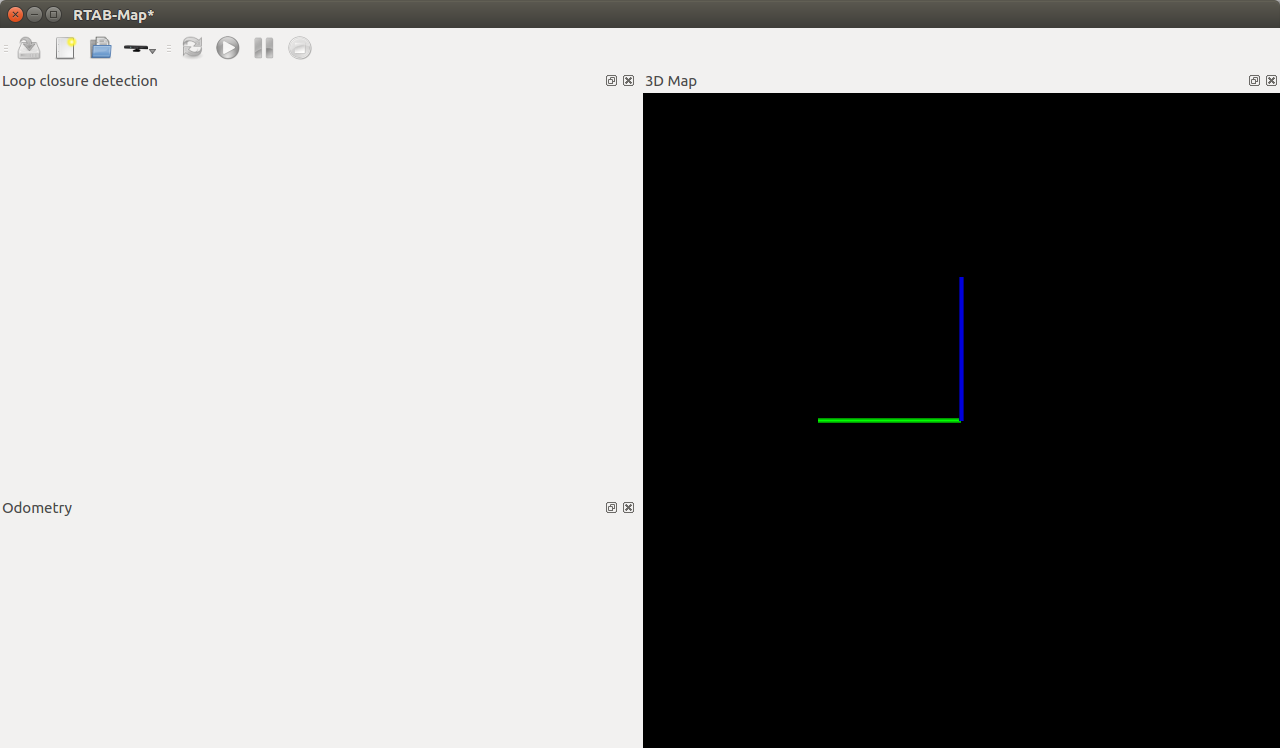
And then i use the command "$ rtabmap" to start the program, and I get the interface like this:
I had tried using the RGB-D datasets to generate the dense map, which is pretty good.
However, when i want to use the stereo images to generate the map, it warns that i need to calibrate like the following picture:
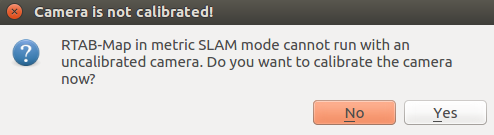
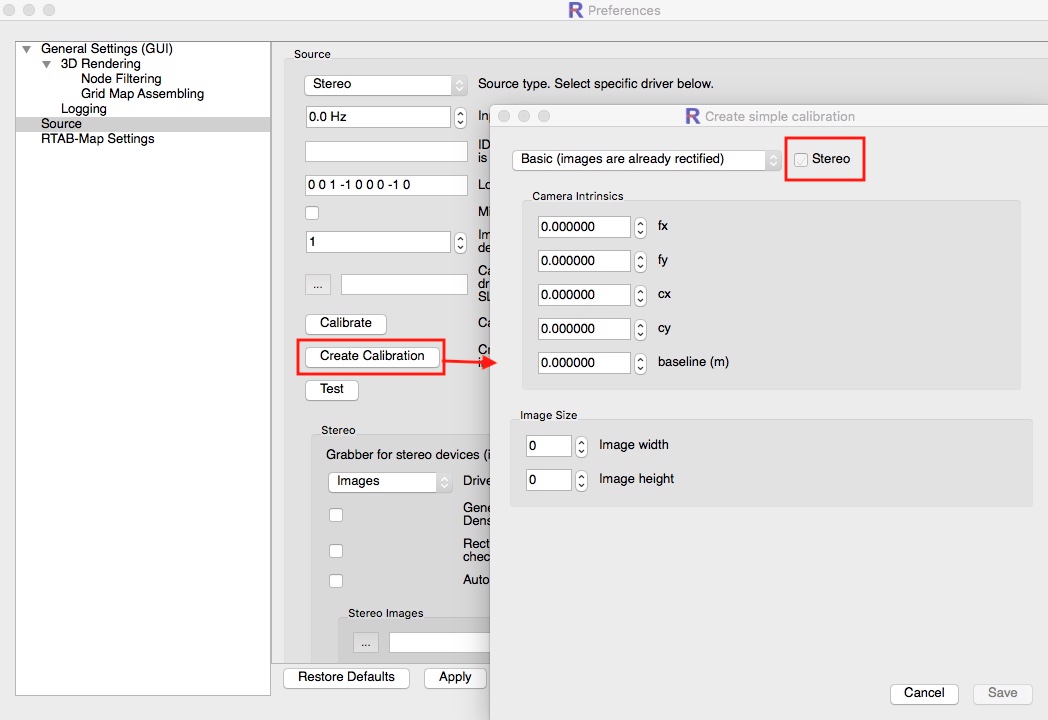
But actually, the stereo images i got is simulation data(have no distortion and don't need to do stereo calibration). so i wonder if it possible to run it directly without the process of calibration, or maybe i could manually provide a calibration parameters file(just like using RGB-D image)? If i could manually provide the calibration file, what kind of the format should it have?
Thx!!