Using Realsense r200 camera for mapping


|
This post was updated on .
Hello everyone!
I am very new to ROS and RTAB, so please excuse if this question is too simple. I am using r200 realsense camera only (no extrenal odometry). My aim is to record a bag file and then be able to play the bag file to recreate the map. I have tried different approaches; however, I am not able to bring up the rtab gui when replaying the bag file. I have followed this post: http://official-rtab-map-forum.206.s1.nabble.com/How-to-reocrd-ros-bag-file-for-rtabmap-database-td567.html Here is the sequence of commands I have used: 1. Launch r200 with: roslaunch realsense_camera r200_nodelet_rgbd.launch 2. Record the Bag file: rosbag record -O trial /camera/rgb/image_rect_color /camera/rgb/camera_info /camera/depth_registered/image_war /tf - Please let me know if I am recording sufficient amount of topics (and if they are the right ones)? 3. After shutting down the recording and camera: - roscore - rosparam set use_sim_time true - roslaunch rtabmap_ros data_recorder.launch 4. The terminal displays the message that the rtab was launched, although no window pops up. 5. In a separate terminal window: rosbag play --clock trial.bag After this sequence I can see that the bag time in incrementing; however, nothing is displayed. Running "rostopic list" shows: /camera/depth_registered/image_raw /camera/rgb/camera_info /camera/rgb/image_rect_color /clock /cloud_map /global_path /goal /goal_node /goal_out /goal_reached /grid_map /info /labels /local_path /mapData /mapGraph /move_base/cancel /move_base/feedback /move_base/goal /move_base/result /move_base/status /octomap_binary /octomap_cloud /octomap_empty_space /octomap_full /octomap_proj /proj_map /rosout /rosout_agg /scan_map /tf /tf_static rostopic echo /camera/depth_registered/image_raw works as it continuously spits out numbers. Any help is appreciated. Cheers |
|
Administrator
|
This post was updated on .
Hi,
You can subscribe to rosbag topics directly instead of using data_recorder.launch. For example (not tested) from tutorial on ros wiki: Record the bag: $ roslaunch realsense_camera r200_nodelet_rgbd.launch $ rosbag record -O trial \ /camera/rgb/image_rect_color \ /camera/rgb/camera_info \ /camera/depth_registered/sw_registered/image_rect_raw \ /tf_staticEDIT replaced /tf by /tf_static Replay the bag: $ roscore $ rosparam use_sim_time true $ roslaunch rtabmap_ros rtabmap.launch \ rtabmap_args:="--delete_db_on_start" \ frame_id:=camera_link \ depth_topic:=/camera/depth_registered/sw_registered/image_rect_raw $ rosbag play --clock trial.bag The minimal topics are RGB image, registered depth image, rgb camera info and /tf between frame of the camera (e.g., camera_link) and the optical frames. cheers, Mathieu |
|
|
This post was updated on .
Hi Mathieu,
Thank you for helping me out! So when I try to play the bag file, I receive the following output in the terminal where I launched the rtabmap.launch file. For some reason I cannot get a transform from camera_link to camera_rgb_optical_frame. What do you think could be the problem? After running: $ rosrun tf view_frames It shows that no transform exists after the camera_link 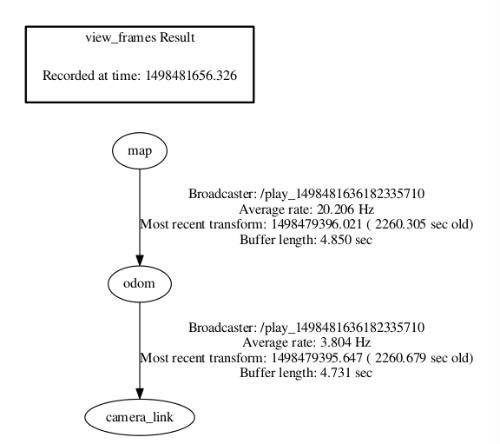 cear@cear-Kangaroo-Mobile-Desktop:~/bagfiles$ roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" frame_id:=camera_link depth_topic:=/camera/depth_registered/sw_registered/image_rect_raw ... logging to /home/cear/.ros/log/1e50fdb6-5a67-11e7-a472-00215cef3f21/roslaunch-cear-Kangaroo-Mobile-Desktop-8580.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt Done checking log file disk usage. Usage is <1GB. started roslaunch server http://cear-Kangaroo-Mobile-Desktop:33059/ SUMMARY ======== PARAMETERS * /rosdistro: indigo * /rosversion: 1.11.21 * /rtabmap/rgbd_odometry/approx_sync: True * /rtabmap/rgbd_odometry/config_path: * /rtabmap/rgbd_odometry/frame_id: camera_link * /rtabmap/rgbd_odometry/queue_size: 10 * /rtabmap/rgbd_odometry/wait_for_transform_duration: 0.2 * /rtabmap/rtabmap/Mem/IncrementalMemory: true * /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false * /rtabmap/rtabmap/approx_sync: True * /rtabmap/rtabmap/config_path: * /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db * /rtabmap/rtabmap/frame_id: camera_link * /rtabmap/rtabmap/queue_size: 10 * /rtabmap/rtabmap/subscribe_depth: True * /rtabmap/rtabmap/subscribe_scan: False * /rtabmap/rtabmap/subscribe_scan_cloud: False * /rtabmap/rtabmap/subscribe_stereo: False * /rtabmap/rtabmap/wait_for_transform_duration: 0.2 * /rtabmap/rtabmapviz/frame_id: camera_link * /rtabmap/rtabmapviz/queue_size: 10 * /rtabmap/rtabmapviz/subscribe_depth: True * /rtabmap/rtabmapviz/subscribe_odom_info: True * /rtabmap/rtabmapviz/subscribe_scan: False * /rtabmap/rtabmapviz/subscribe_scan_cloud: False * /rtabmap/rtabmapviz/subscribe_stereo: False * /rtabmap/rtabmapviz/wait_for_transform_duration: 0.2 NODES /rtabmap/ rgbd_odometry (rtabmap_ros/rgbd_odometry) rtabmap (rtabmap_ros/rtabmap) rtabmapviz (rtabmap_ros/rtabmapviz) ROS_MASTER_URI=http://localhost:11311 core service [/rosout] found process[rtabmap/rgbd_odometry-1]: started with pid [8598] process[rtabmap/rtabmap-2]: started with pid [8599] process[rtabmap/rtabmapviz-3]: started with pid [8600] [ INFO] [1498478689.685131258]: Starting node... [ INFO] [1498478689.721655713]: Initializing nodelet with 4 worker threads. [ INFO] [1498478689.875068667]: Starting node... [ INFO] [1498478690.206772816]: rtabmapviz: Using configuration from "/home/cear/.ros/rtabmap_gui.ini" [ INFO] [1498478691.449311016]: Reading parameters from the ROS server... [ INFO] [1498478691.795028445]: /rtabmap/rgbd_odometry subscribed to (approx sync): /camera/rgb/image_rect_color, /camera/depth_registered/sw_registered/image_rect_raw, /camera/rgb/camera_info [ INFO] [1498478691.975110676]: Parameters read = 0 [ INFO] [1498478692.539826771]: /rtabmap/rtabmapviz subscribed to: /camera/rgb/image_rect_color, /camera/depth_registered/sw_registered/image_rect_raw, /camera/rgb/camera_info, /rtabmap/odom, /rtabmap/odom_info [ INFO] [1498478692.606576772]: rtabmapviz started. [ INFO] [1498478700.400159167, 1498478370.189552426]: rtabmap: frame_id = camera_link [ INFO] [1498478700.400320797, 1498478370.189552426]: rtabmap: map_frame_id = map [ INFO] [1498478700.400373649, 1498478370.189552426]: rtabmap: queue_size = 10 [ INFO] [1498478700.400427051, 1498478370.189552426]: rtabmap: tf_delay = 0.050000 [ INFO] [1498478700.400473440, 1498478370.189552426]: rtabmap: tf_tolerance = 0.100000 [ INFO] [1498478700.400519641, 1498478370.189552426]: rtabmap: depth_cameras = 1 [ INFO] [1498478700.400568031, 1498478370.189552426]: rtabmap: approx_sync = true [ WARN] [1498478700.773998409, 1498478370.567159581]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.307806) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478700.986240837, 1498478370.778189319]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.541324) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ INFO] [1498478701.009095974, 1498478370.802617783]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true" [ INFO] [1498478701.012701820, 1498478370.802617783]: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false" [ WARN] [1498478701.200430880, 1498478370.992665959]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.741237) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478701.403666770, 1498478371.197024774]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478370.941204) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478701.610582046, 1498478371.403818933]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.173964) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478701.834498100, 1498478371.624309936]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.374827) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478702.039415284, 1498478371.832435127]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.607600) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478702.242869444, 1498478372.036025591]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478371.807392) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478702.447103380, 1498478372.239976468]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.007908) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478702.649310486, 1498478372.441382247]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.207412) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478702.856871508, 1498478372.650019043]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.406877) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478703.072593140, 1498478372.865104765]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.639890) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478703.280424083, 1498478373.073957181]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478372.840311) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ INFO] [1498478703.363667409, 1498478373.140633616]: RTAB-Map detection rate = 1.000000 Hz [ INFO] [1498478703.364021883, 1498478373.140633616]: rtabmap: Deleted database "/home/cear/.ros/rtabmap.db" (--delete_db_on_start is set). [ INFO] [1498478703.364126574, 1498478373.140633616]: rtabmap: Using database from "/home/cear/.ros/rtabmap.db". [ WARN] [1498478703.497307866, 1498478373.290375422]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.039886) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ INFO] [1498478703.514196942, 1498478373.300455884]: rtabmap: Database version = "0.11.8". [ WARN] [1498478703.705277976, 1498478373.498292769]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.239953) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478703.915433185, 1498478373.707720341]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.474020) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ INFO] [1498478703.935389688, 1498478373.723250633]: /rtabmap/rtabmap subscribed to (approx sync): /camera/rgb/image_rect_color, /camera/depth_registered/sw_registered/image_rect_raw, /camera/rgb/camera_info, /rtabmap/odom [ INFO] [1498478703.935921668, 1498478373.723250633]: rtabmap 0.11.8 started... [ WARN] [1498478704.132651104, 1498478373.922224956]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.673098) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! [ WARN] [1498478704.330341259, 1498478374.123225648]: odometry: Could not get transform from camera_link to camera_rgb_optical_frame (stamp=1498478373.906647) after 0.200000 seconds ("wait_for_transform_duration"=0.200000)! |
|
Administrator
|
That TF would be sent by the camera driver. Did you record /TF in the bag?
|
|
|
I ran the same commands as you mentioned. Moreover, rosbag info shows that /tf messages were recorded, so I am not sure what is the problem.
cear@cear-Kangaroo-Mobile-Desktop:~/bagfiles$ rosbag info trial6.bag path: trial6.bag version: 2.0 duration: 42.9s start: Jun 26 2017 16:17:35.27 (1498483055.27) end: Jun 26 2017 16:18:18.20 (1498483098.20) size: 998.0 MB messages: 3283 compression: none [888/888 chunks] types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214] sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743] tf2_msgs/TFMessage [94810edda583a504dfda3829e70d7eec] topics: /camera/depth_registered/sw_registered/image_rect_raw 650 msgs : sensor_msgs/Image /camera/rgb/camera_info 996 msgs : sensor_msgs/CameraInfo /camera/rgb/image_rect_color 701 msgs : sensor_msgs/Image /tf 936 msgs : tf2_msgs/TFMessage (2 connections) |
|
Administrator
|
What is the TF tree when you replay the bag alone?
|
|
|
Weirdly it is the same TF tree.
 I tried several times with and without rtabmap.launch, the tree is the same. |
|
Administrator
|
Make sure you launched only "$ roslaunch realsense_camera r200_nodelet_rgbd.launch" before recording the bag.
|
|
|
Here is what I got: - Before, when launching the realsense, I also launched rtabmap.launch to see what I was recording in the bag file. - Now, I tried recording the bag file only with realsense launch file running and found that no /tf topic was recorded. - While running the realsense camera, rostopic echo/hz /tf showed no signs that anything was published on this topic. Why could this be the case? |
|
Administrator
|
Hi,
I tried with my realsense, the TF missing is in /tf_static, not /tf. I corrected the rosbag record line above:
$ rosbag record -O trial\
/camera/rgb/image_rect_color\
/camera/rgb/camera_info\
/camera/depth_registered/sw_registered/image_rect_raw\
/tf_static
cheers, Mathieu |
«
Return to Official RTAB-Map Forum
|
1 view|%1 views
| Free forum by Nabble | Edit this page |