Hi guys,
I am a bit confused with the
frame_id,
odom_frame_id and
map_frame_id that i have to setup :
<arg name="camera_name" default="camera_realsense_1"/>
<arg name="frame_id" default="($arg camera_name)_link"/>
<arg name="odom_frame_id" default="odom"/>
<arg name="map_frame_id" default="map"/>
<arg name="publishTF" default="false"/>
so that RTAB Map returns a correct 3D cloud and a visual information (speed/orientation?) on the odometry of the robot that will be processed afterwards in an EKF. Therefore, i want the EKF to publish the odometry, not RTABMap.
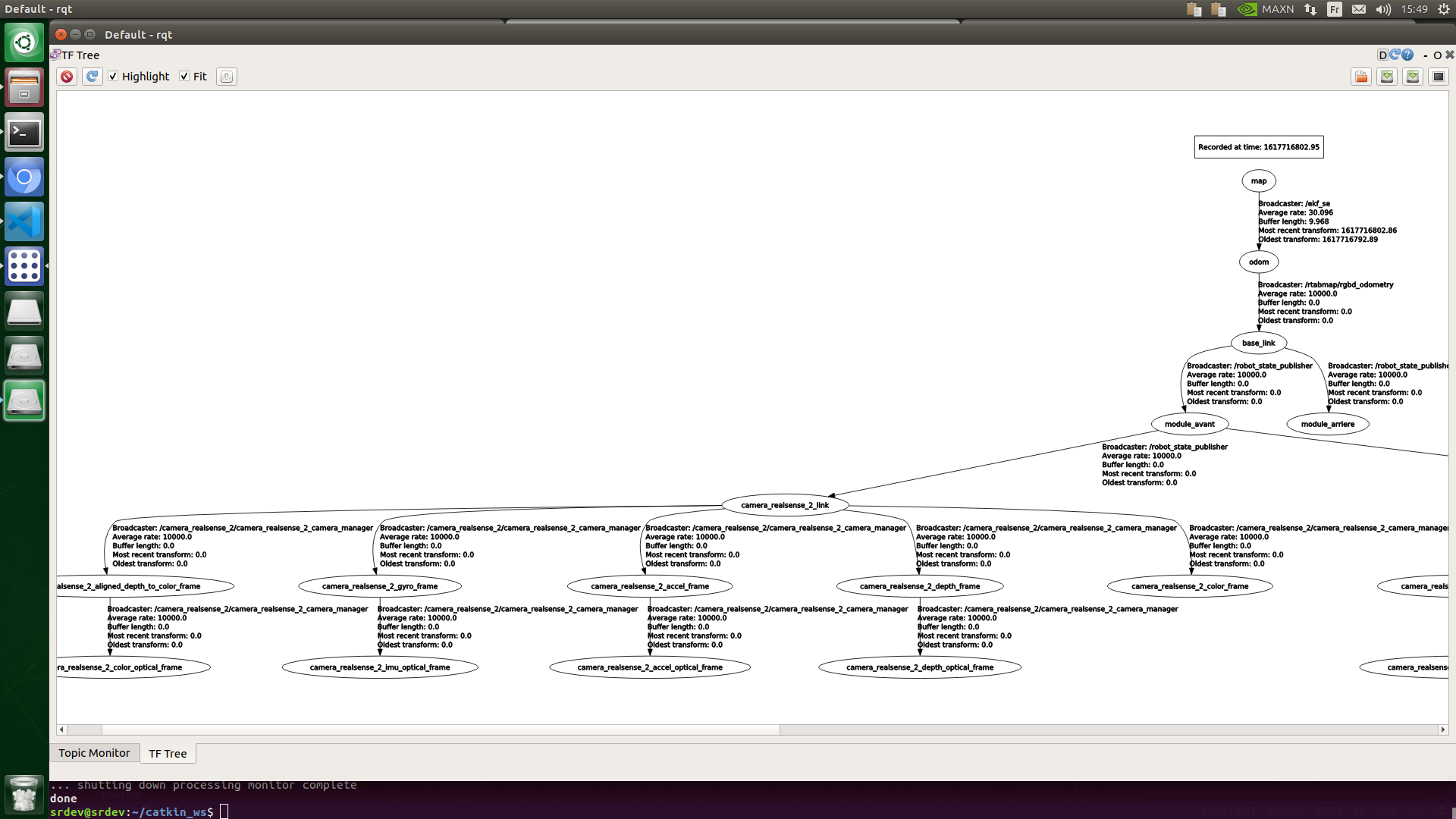
I see confusing information on the web, even if they all might be true, saying that the link
map->odom if for global positioning and might be discontinuous, while
odom->base_link shall be continuous and can drift over time.
That being said : in my case
map->odom is for global positionning but is continuous and drifts over time.
I can't also let RTABMap publishes on
odom->base_link. So here are my questions:
- Should I set
odom = map and let the ekf publish the tf on
map->base_link ?
- How can I and should I disable RTABMap from publishing it's odometry between
odom->base_link ?